Горнопроходческие работы (ГПР) при проведении выработок буровзрывным способом занимают особое место в деятельности горного предприятия: трудоёмкость ГПР составляет более 25 % общих трудозатрат. ГПР являются одновременно фондообразующим и фондопотребляющим процессами, при этом стоимость выработок достигает 60 % основных фондов. Проблема снижения затрат на проведение выработок остаётся весьма актуальной.
При множестве альтернативных направлений решения указанной проблемы необходимо выделить одно – разработка научно-обоснованных методов и процедур выбора горнопроходческого оборудования в условиях развитого рынка машиностроительной продукции. Решение такой задачи актуально по следующим соображениям:
существование множества вариантов горнопроходческих машин для конкретных условий;
высокая стоимость оборудования и значительный уровень экономического риска;
завышенные рекламные характеристики оборудования заводов-изготовителей;
неполнота информации о рабочих процессах горнопроходческих машин, содержащаяся в литературе и нормативных документах, в которых функционирование машин рассматривается на основе усреднённых детерминированных моделей, что приводит к искажённым оценкам характеристик машин.
Вместе с тем, полная задача выбора горнопроходческого комплекта или комплекса является сложной и объёмной, решение которой возможно на основе имитационного моделирования. В соответствии с системной концепцией решения подобных задач необходимо обоснование целевой функции, совокупности ограничений, моделирование работы вариантов оборудования в процессах разрушения, погрузки призабойного транспорта, крепления, сопоставления вариантов и выбор приемлемого. Это требует разработки соответствующей научно-методической основы, программного обеспечения, создания баз данных, что в настоящее время представляется затруднительным. Целесообразно приступить к решению задачи по частям, для отдельных подсистем.
Погрузочно-транспортный модуль (ППТМ) проходческой системы (рис.) можно считать достаточно обособленным объектом, выполняющим функцию выгрузки штабеля разрыхлённой взрывом горной массы и удаление её за пределы призабойной зоны. ППТМ характеризуется разнообразием конструктивных форм, многочисленными вариантами сочетания погрузочной и призабойной транспортной подсистем. Отличительная особенность ППТМ состоит в том, что средой взаимодействия является штабель кускового материала, в котором реализуются случайные процессы при внедрении, захвате, погрузке горной массы и её транспортировании.
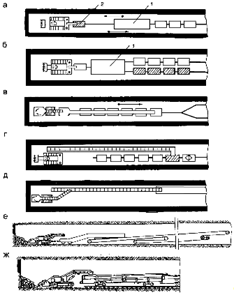
Разновидности проходческих погрузочно-транспортных модулей: а – погрузочная машина ковшового типа при погрузке в одиночные вагонетки;
б – то же в двухпутевой выработке; в – погрузочная машина в сочетании
с монорельсовым перегружателем; г – то же с напочвенным перегружателем;
д – то же в сочетании с конвейерной линией; е – то же с телескопическим конвейером; ж – погрузочная машина в сочетании с самоходным вагоном (1 – обменное устройство; 2 – вагонетка)
Цель работы заключается в снижении уровня риска при выборе альтернативных вариантов проходческих погрузочно-транспортных модулей на основе использования программно-методического обеспечения имитационного моделирования рабочих процессов ППТМ. Основная идея работы состоит в разработке базовых математических моделей, обосновании процедур имитационного моделирования процессов погрузки и транспортирования кусковых пород погрузочным оборудованием периодического действия с учётом случайного характера внешних воздействий.
При разработке методов и процедур имитационного моделирования ППТМ я исходил из следующих базовых положений.
1. Предельные технические возможности погрузочно-транспортных модулей в конкретных условиях эксплуатации должны определяться на основе адекватных математических моделей, имитационного моделирования процессов формирования производительности, трудоёмкости за общее время погрузки и транспортирования с учётом случайного гранулометрического состава штабеля, потоков отказов и восстановлений оборудования.
2. Гранулометрический состав штабеля горной массы представляет собой непрерывную функцию распределения случайного размера куска, которая преобразуется в процессах единичных черпаний погрузочным органом (ковшом, нагребающими лапами, клиновым носком и т.д.); объём единичного захвата из штабеля формируется как случайный процесс внедрения и зачерпывания, при этом малые локальные объёмы в погрузочных органах и перед их кромками должны описываться на основе экспериментально установленного закона распределения.
3. Производительность за чистое время погрузки ППТМ, в состав которого входит ковшовая погрузочная машина, должна определяться при последовательном использовании детерминированных математических моделей сопротивлений внедрению, зачерпыванию, наполнения ковша, динамических процессов подсистем напора и подъёма ковша как минимальное значение с учётом ограничивающих факторов – напорного усилия и энерговооружённости приводов, а реализация случайных воздействий со стороны штабеля горной массы должна учитываться через средний случайный размер куска в локальном объёме перед кромкой ковша и случайный объём единичного захвата.
4. При имитационном моделировании работы ППТМ, в состав которого входит погрузочная машина с нагребающими лапами, должны учитываться взаимосвязанные динамические процессы подачи машины на штабель, захвата материала лапами, изменения объёма активной зоны и управление механизмом подачи в функции нагрузки в приводе нагребающей части; случайные составляющие объёмов единичного захвата лапами формируются при этом под воздействием локальных изменений гранулометрического состава в зоне сдвига.
5. Пропускная способность проходческого перегружателя, входящего в состав погрузочно-транспортного модуля, определяется также случайными процессами захвата порции материала тягово-транспортирующим органом и изменением гранулометрического состава порций материала при передаче груза из одной ячейки в другую.
В работе использованы методы теории вероятностей, математической статистики, имитационного моделирования многосвязных систем при случайном характере внешних воздействий, а также методы теоретической механики, теории электропривода.
- Проходческая система как объект имитационного моделирования
- Обзор методов и процедур, используемых в практике имитационного моделирования процессов горного производства
- Анализ состояния разработки математических моделей, описывающих функционирование проходческих погрузочно-транспортных модулей
- Общая структура моделей и последовательность процедур моделирования погрузочно-транспортных модулей
- Описание состава штабеля как функции случайной величины размера куска
- Моделирование гранулометрического состава в малом выделенном объёме
- Средний случайный размер куска в малом выделенном объёме
- Математические модели процесса внедрения ковша в штабель
- Математические модели процесса зачерпывания
- Объём единичного захвата ковшом. Предельная вместимость ковша и объём ссыпания
- Общее построение имитационной модели формирования потока случайных объёмов черпания
- Математические модели поцикловой продолжительности единичных черпаний
- Исследование и оценка предельных возможностей проходческого специализированного перегружателя
- Общее построение инженерной методики
- Алгоритм и программа имитационной модели функционирования погрузочно-транспортного модуля
- Прогнозная оценка эффективности различных вариантов погрузочно-транспортных модулей