Для обеспечения нормальных условий работы привода подъёма ковша необходимо и достаточно, чтобы максимальный момент, развиваемый приводом на оси поворота ковша Мп.max, превышал максимальный момент сопротивления зачерпыванию Мз.max, то есть:
Мп.max > Мз.max . (3.22)
Таким образом, для расчёта предельной глубины внедрения ковша по фактору максимальных силовых возможностей механизма черпания, необходимо иметь две математические модели: максимального момента сопротивлений раздельному зачерпыванию Мз.max; максимального момента, развиваемого приводом на оси поворота ковша Мп.max.
Максимальный момент сопротивлений черпанию необходимо рассчитывать для раздельного способа зачерпывания, так как при совмещённом зачерпывании после начального этапа сдвига горной массы сопротивления снижается [39]. При этом необходимо учитывать, что в процессе погрузки не всегда возникают условия для реализации совмещённого черпания из-за ограничения возможностей механизма подачи (или ходового механизма).
Во-вторых, условие (3.22) должно быть реализовано в динамическом процессе совместного поворота привода, ковша и сдвигаемой горной массы. Уравнение динамики имеет вид:
![]() , (3.23)
, (3.23)
где Jпр – приведённый момент инерции системы к оси поворота ковша; в общем случае – это сумма моментов инерции привода, ковша и сдвигаемого объёма горной массы, кг×м2; wз – угловая скорость поворота, 1/с2; jз – угол поворота ковша при зачерпывании.
Если предположить, что величина момента сил инерции ![]() мала, то уравнение (3.23) преобразуется к статическому Мп.max = Kзз × Мз.max, где Kзз – коэффициент запаса по моменту (1,1–1,15).
мала, то уравнение (3.23) преобразуется к статическому Мп.max = Kзз × Мз.max, где Kзз – коэффициент запаса по моменту (1,1–1,15).
Такое предложение может быть принято в связи с тем, что шахтные погрузочные машины снабжаются приводом поворота ковша, который обеспечивает предварительный разгон системы, выборку зазоров и плавное регулирование передачи нагрузки от ковша к сдвигаемой горной массе. При этом величина угловой скорости wз не превышает 0,5 1/с, угловое ускорение ![]() не более 1 1/с2, а момент сил инерции по предварительным расчётам не превышает 5–10 % номинального момента двигателя. Поэтому для выпускаемых ШПМ можно пользоваться приближённым статическим условием (3.22). При этом, строго говоря, необходимо показать пределы применимости этого соотношения для различных условий – характеристик привода подъёма ковша и объёмов зачерпывания.
не более 1 1/с2, а момент сил инерции по предварительным расчётам не превышает 5–10 % номинального момента двигателя. Поэтому для выпускаемых ШПМ можно пользоваться приближённым статическим условием (3.22). При этом, строго говоря, необходимо показать пределы применимости этого соотношения для различных условий – характеристик привода подъёма ковша и объёмов зачерпывания.
Максимальный момент сопротивлений раздельному зачерпыванию определяется на основе обобщений известных экспериментальных данных [64, 65]. Математическое ожидание момента Мз.max., Н, находят по формуле:
Мз.max. = Кразм ×![]() × Rк × Sвн (Sвн + 15dср) Квг × Квш × Кa × jн, (3.24)
× Rк × Sвн (Sвн + 15dср) Квг × Квш × Кa × jн, (3.24)
где dср – средний размер куска, формируемый перед кромкой ковша в начальный период зачерпывания;
Кразм = 48×106 H/м3 – коэффициент согласования размерностей.
Обозначения остальных величин показаны на рисунке 3.7.
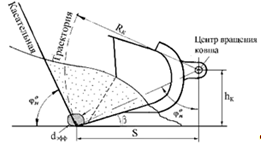
Рис. 3.7. Геометрические характеристики к расчётам максимального момента сопротивления зачерпыванию
Коэффициенты Квг, Квш, Кa имеют те же значения, что и в модели сопротивлений внедрению (3.7). Угол jн характеризует положение траектории передней кромки ковша. Ширина ковша B¢к в общем случае не равна геометрической ширине днища ковша. Необходимо учитывать дополнительные зоны сдвига боковыми стенками, отклонёнными наружу (рис. 3.8).
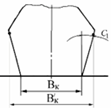

Рис. 3.8. Учёт влияния отклонения боковых стенок
Из геометрических соотношений средняя по высоте стенки глубина внедрения стенки ![]() составит:
составит:
 (3.25)
(3.25)
где j – угол откоса штабеля.
Тогда, учитывая уширение ковша с двух сторон,
![]() ,
,
а приведённую ширину ковша ![]() необходимо определить по формуле:
необходимо определить по формуле:
 . (3.26)
. (3.26)
Для оценки адекватности математической модели (3.24) экспериментальным данным на рисунке 3.9 приводятся зависимости Мз.max (Sвн) для машин 1ППН-5, МПК-3 и МПК-1000Т для следующих исходных данных: