Алгоритм имитационной модели функционирования ППТМ в период проходческого цикла разработан в соответствии со структурой инженерной методики выбора рациональных вариантов проходческих погрузочно-транспортных модулей (п. 5.1) и, по существу, осуществляет детализацию действий пользователя при решении задачи выбора.
Структурно алгоритм содержит следующие блоки:
ввод исходных данных по проводимой выработке, выбор типового сечения или его конструирование;
преобразование исходных горно-технологических условий в требуемые характеристики штабеля горной массы;
обращение к базам данных погрузочных машин, призабойных транспортных средств, типовых технологических схем ППТМ для отбора конкурирующих вариантов, совместимых с исходными данными;
составление перечня конкурирующих вариантов ППТМ, уточнение характеристик каждого варианта – технологических, конструктивных и пр.;
моделирование стохастического процесса формирования потока единичных черпаний ковшовым рабочим органом или единичных захватов нагребающими лапами;
моделирование потока длительности циклов черпания и доставки объёмов захвата к средствам призабойного транспорта;
обращение к базе данных «Номенклатура и трудоёмкость подготовительно-заключительных и вспомогательных операций» для конструирования модели трудоёмкости несовмещаемых операций и общей удельной трудоёмкости погрузки;
расчёт общего времени выгрузки штабеля, производительности и удельной трудоёмкости системы;
формирование протокола результатов моделирования по конкурирующим вариантам.
Исходные данные о проводимой выработке. Предусмотрены две возможности при конкретизации формы и размеров поперечного сечения:
а) форма сечения – арочная; в этом случае пользователь обращается к базе форм и размеров выработок арочной формы и выбирает типовые сечения, соответствующие требованиям заказчика. Предусматривается воспроизведение геометрической формы и основных размеров сечения. Каждое типовое сечение характеризуется типом (II или I), который определяет форму свода (рис. 5.2). Для каждого типа сечений записывается уравнение контура арочного свода. Уравнение контура кровли выработки арочной формы устанавливается в следующем порядке (рис. 5.2).
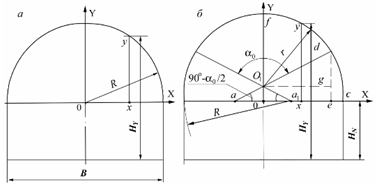
Рис. 5.2. Геометрическая форма поперечного сечения выработок:
а – тип II; б – тип I
Для сечения второго типа:
![]() ;
; ![]() , 0 £ x £ R,
, 0 £ x £ R, ![]() .
.
Для сечения первого типа:
![]() ,
, ![]() ,
,
![]() , 0 £ x £ r
, 0 £ x £ r ![]() ,
, ![]() .
.
Необходимые исходные данные: HN, R, B – для II типа, HN, R, r, ![]() o, B – для I типа. Возможно вместо одного из радиусов использовать соотношение:
o, B – для I типа. Возможно вместо одного из радиусов использовать соотношение:
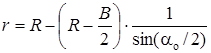 ;
;
б) форма сечения прямоугольная, трапециевидная или специальная. В этом случае предусматривается возможность вычерчивания сечения путём его предварительного конструирования. По результатам этой процедуры устанавливается геометрический образ поперечного сечения и его основные размеры: ширина, высота, площадь и др.