HQ – высота максимальная кромки ковша (точки Q) при разгрузке ковша в вагонетку;
Hp – высота разгрузки нижней кромки ковша над вагонеткой;
Hв – высота вагонетки над уровнем головки рельсов; bвг – ширина вагонетки;
hp – высота головки рельсов над уровнем почвы выработки; D, D1 – зазоры согласно ПБ;
a – угол наклона ковша при ссыпании (разгрузке); Bк, Lк – ширина, длина ковша
Моделирование стохастического процесса формирования потока единичных черпаний ковшовыми погрузочными машинами. На этом этапе формируются ряды Vкj как совокупности случайных последовательностей при выгрузке штабеля. Используются математические модели, обоснованные в главах 2–4. В качестве исходных данных принимаются форма, размеры штабеля, его прогнозный гранулометрический состав. С учётом выводов, полученных в п. 2.4, моделирование размера куска в малом выделенном объёме производится по одноступенчатой схеме без поциклового изменения гранулометрического состава штабеля и, соответственно, без определения гранулометрического состава груза в каждом малом выделенном объёме v: перед кромками рабочих органов, в ковше и т.д. Таким образом, структура алгоритма, формирующего случайный объём черпания ковша, может быть представлена следующим образом (рис. 5.6).
Блоки исходных данных состоят, в общем случае, из трёх подразделов: 1 – общий: горная выработка и горно-технологические условия её проведения; 2 – штабель горной массы: форма, размеры, гранулометрический состав; 3 – погрузочная машина: все необходимые характеристики машины в целом, погрузочного органа, привода; перечень характеристик определяется математическими моделями рабочих процессов, приведённых в пп. 3.1…3.4.
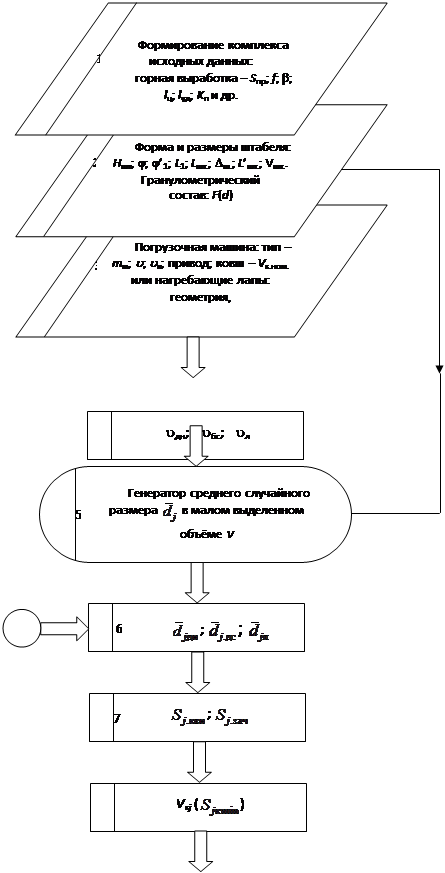 |
Рис. 5.6. Блок-схема алгоритма процесса формирования потока единичных черпаний (начало; окончание см. на с. 124)
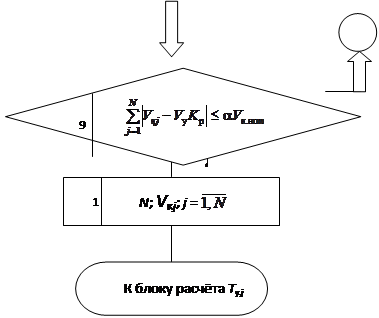 |
Рис. 5.6. Окончание (начало см. на с. 123)
В состав имитационной модели входит блок 5 – генератор среднего случайного размера куска djк в малом выделенном объёме v. Генератор представляет собой функциональный блок, выдающий на выходе для каждого j-номера черпания djк.
На вход блока подаются исходные значения влияющих факторов, от которых зависит среднекватратичное отклонение sd случайного размера куска при моделировании по нормальному закону распределения. К ним относятся: гранулометрический состав штабеля F(d); значения малых объёмов – перед кромкой днища ковша vдн, боковой стенки ковша vбс и лапы vл.
Методика расчёта значений vдн, vбс, vл приводится в п. 2.4. Полученное на выходе генератора значение ![]() уточняется путём формирования случайного поразрядного состава горной массы с использованием биноминального закона распределения (2.3). Далее в блоках 6, 7, 8 рассчитывается глубина внедрения ковша по факторам напорного усилия Sjквн и максимальных возможностей механизма зачерпывания Sjкзач. По минимальному из этих значений определяется объём идеального черпания и объём ссыпания. В результате этих процедур для каждого j конкретизируются значения Vкj.
уточняется путём формирования случайного поразрядного состава горной массы с использованием биноминального закона распределения (2.3). Далее в блоках 6, 7, 8 рассчитывается глубина внедрения ковша по факторам напорного усилия Sjквн и максимальных возможностей механизма зачерпывания Sjкзач. По минимальному из этих значений определяется объём идеального черпания и объём ссыпания. В результате этих процедур для каждого j конкретизируются значения Vкj.
Моделирование ведётся по номерам циклов до выполнения условия, приведённого в блоке 9. В блоке 10 фиксируется поток объёмов черпания ![]() и число черпаний для выгрузки всего объёма штабеля Vшт. Отметим, что реализация случайного потока
и число черпаний для выгрузки всего объёма штабеля Vшт. Отметим, что реализация случайного потока ![]() происходит на двух участках штабеля – в зоне разброса и в основной части штабеля (рис. 5.3). В каждом цикле учитывается реальная высота штабеля Hшт. Черпания машины принимаются осевыми, реальная схема выгрузки штабеля не моделируется в связи со сложностью математических моделей, описывающих этот процесс.
происходит на двух участках штабеля – в зоне разброса и в основной части штабеля (рис. 5.3). В каждом цикле учитывается реальная высота штабеля Hшт. Черпания машины принимаются осевыми, реальная схема выгрузки штабеля не моделируется в связи со сложностью математических моделей, описывающих этот процесс.