Для погрузочных машин с нагребающими лапами в качестве номинального объёма vл принимается средний объём черпаний, вычисленный по математическим моделям, представленным в работе [102]. Порядок вычисления принят следующий:
напорное усилие механизма подачи;
глубина внедрения наклонной плиты;
объём материала в активной зоне;
номинальный объём черпания двумя лапами vл.
Остальные процедуры расчёта в принципиальном плане сохраняются, изменяются лишь расчётные модели.
Моделирование потока длительностей циклов черпания и доставки объёмов захвата к средствам призабойного транспорта. Должно выполняться в соответствии с алгоритмами, обоснованными в пп. 4.1 и 4.2. В подпрограмме длительности цикла черпания для ковшовых ШПМ должны быть созданы следующие блоки:
продолжительность цикла «чистой» погрузки Tчj в составе: продолжительность собственно цикла черпания Tч1j; продолжительность транспортирования зачерпнутого груза к месту передачи на средства ПЗТ – Tч2j;
продолжительность несовмещаемых с чистой погрузкой подготовительно-заключительных, вспомогательных операций Tвс и операций по обеспечению функционирования ПЗТ – Tтр.
Среди перечисленных трёх составляющих продолжительности цикла случайной будем признавать только Tч2j, так как её значения определяются случайным изменением расстояния транспортирования, которое, в свою очередь, зависит от объёма черпания Vкj и «отодвиганием» передней части штабеля от места разгрузки ковша. Таким образом, алгоритм расчёта TцS может быть представлен следующей логической схемой (рис. 5.7).
Процедуры, перечисленные в операторах 4, 5 и 6…14, обоснованы в пп. 4.1 и 4.2. Расчёт случайной составляющей цикла черпания Tч2j требует специального рассмотрения.
Случайная составляющая цикла черпания. Как показано раннее (п. 4.2), случайная составляющая цикла черпания Tч2j является следствием изменения длины штабеля в процессе погрузки Lj после каждого цикла черпания j. При этом для различных вариантов ППТМ возможны два случая реализации Tч2j:
1) погрузка ведётся на проходческий передвижной перегружатель при постоянном расстоянии от начала штабеля до места разгрузки ковша l0; в этом случае Tч2j складываются из двух составляющих:
Tч2j = (l0/![]() ср + Lj /
ср + Lj /![]() ср),
ср),
где ![]() ср – средняя скорость движения машины от места загрузки ковша до места его разгрузки; в этом варианте нужно отыскать случайную последовательность Lj (j, Vкj);
ср – средняя скорость движения машины от места загрузки ковша до места его разгрузки; в этом варианте нужно отыскать случайную последовательность Lj (j, Vкj);
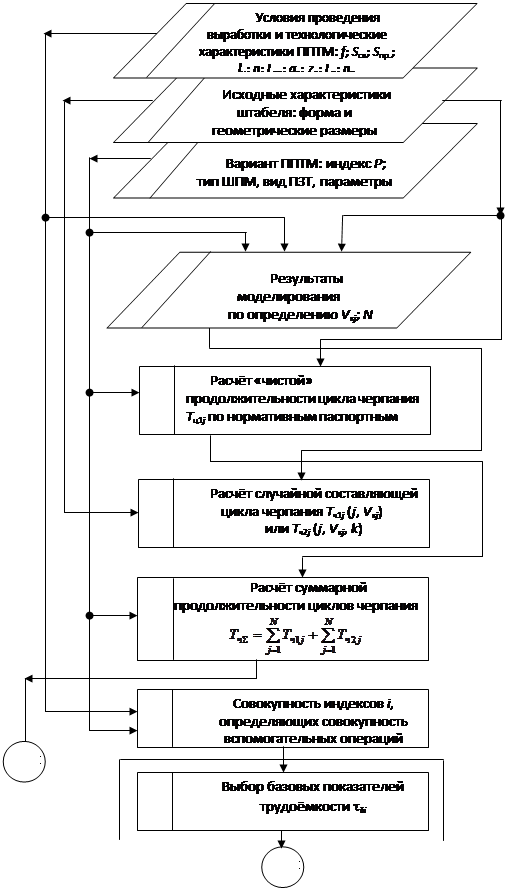 |
Рис. 5.7 Алгоритм расчёта продолжительности выгрузки штабеля
(начало; окончание см. на с. 127)
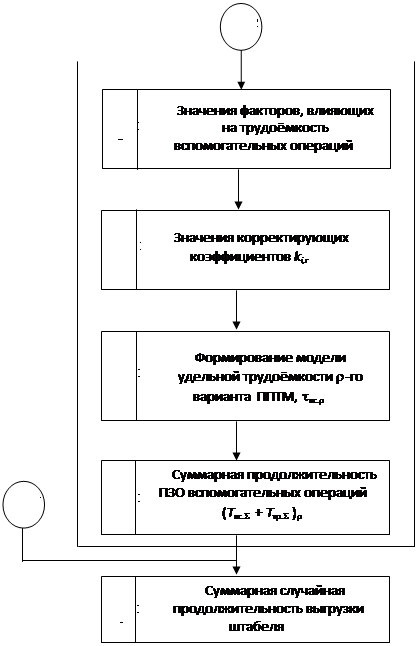
Рис. 5.7. Окончание (начало см. на с. 126)
2) погрузка ведётся в мини-состав, состоящий из zв вагонеток zв = 1, 2, …, k, …; тогда расстояние движения погрузочной машины складывается из трёх составляющих Tч2j = l0/![]() ср + Lzk /
ср + Lzk /![]() ср + Lj /
ср + Lj /![]() ср, где Lzk – расстояние от исходного начального положения машины до k-й вагонетки; в этом варианте нужно отыскивать случайную последовательность Lj (j, Vкj, k).
ср, где Lzk – расстояние от исходного начального положения машины до k-й вагонетки; в этом варианте нужно отыскивать случайную последовательность Lj (j, Vкj, k).