= Aдк × hрх – g(mм + mв) (w¢ cosa – sina), (3.17)
где mпр = (1 + Кj) × (mм + mв) – приведённая к поступательному движению масса системы, кг; mпост – масса поступательно движущихся частей, кг.
Уравнение (3.17) описывает процесс внедрения ковша в штабель на первом этапе, то есть до срыва колёс в пробуксовку. Начальные условия: t = 0; S = 0:  . Величину
. Величину ![]() можно найти из (3.17) при
можно найти из (3.17) при ![]() =0, Wвн(S) = 0, то есть
=0, Wвн(S) = 0, то есть  .
.
Решение выполняется до S = S1, то есть до реализации глубины внедрения первого этапа. Условие окончания первого этапа: сила сцепления Тсц становится равной предельно допустимой, то есть Тсц.max = mм × g × y cosa или

![]() . (3.18)
. (3.18)
Таким образом, при решении уравнения (3.17) в каждой точке t = ti определяется S = Si, ![]() ,
,  и проверяется выполнение условия (3.18).
и проверяется выполнение условия (3.18).
На втором этапе Тсц = Тсц.max, возникает избыточное скольжение колёс, сила сцепления остаётся постоянной и равной Тсц.max [57]. Нагрузка на двигатель сохраняется постоянной. Внедрение ковша описывается одним уравнением (3.14), которое теперь имеет вид:
![]() . (3.19)
. (3.19)
Если умножить левую и правую часть уравнения (3.19) на dS и проинтегрировать левую часть по u, а правую по S, то получим энергетическое соотношение:
 . (3.20)
. (3.20)
Графическая интерпретация решения представлена на рисунке 3.3. Решение уравнения (3.20) сводится к отысканию положения точки S2, в которой это условие выполняется.
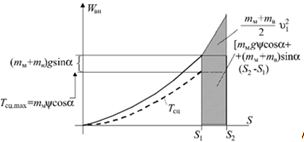
Рис. 3.3. Графическая интерпретация решения уравнения (3.20)
Для жёстких механических характеристик асинхронных двигателей хода возможно более простое решение задачи динамики внедрения. Так как на первом этапе ![]() мало, то, пренебрегая инерционной составляющей на первом этапе, решение может быть получено простым пересечением кривой W(S) и линии статического напора, то есть решением уравнения:
мало, то, пренебрегая инерционной составляющей на первом этапе, решение может быть получено простым пересечением кривой W(S) и линии статического напора, то есть решением уравнения:
![]() . (3.21)
. (3.21)
Во втором этапе решается уравнение (3.20). Ошибка, которая может возникнуть от такого упрощения, зависит от жёсткости механической характеристики двигателя, то есть от величины Sск.ном Для оценки погрешности решения задачи динамики внедрения приближённым методом ниже (табл. 3.1) представлены сопоставительные данные по глубине внедрения ковша в штабель, определённые точным и энергетическим методом (погрузочная машина 1ППН-5, оборудованная ходовым движителем.
Как видно из результатов расчёта, ошибка приближённого энергетического метода не превышает 3,5 % для двигателей с мягкой механической характеристикой (Sном = 0,05). В других вариантах расчёта расхождение величин S2, полученных решением дифференциальных уравнений и энергетическим методом, составляет 0,5–1,2 %. Это позволяет использовать приближённые энергетические соотношения для анализа параметров ковшовых погрузочных машин во взаимосвязи с параметрами ковшей и ходовых приводов.
Таким образом, приближённый энергетический метод может эффективно использоваться для расчёта глубины внедрения ковша в штабель колёсно-рельсовых ШПМ в общей системе математических моделей формирования потока единичных черпаний.
Решение уравнения динамики внедрения ковша в штабель для машин группы МПК-3, которые оборудуются, как правило, регулируемым гидроприводом ходовой части, выполняется аналогично [55]. В качестве регулятора используется устройство, обеспечивающее постоянство мощности, то есть реализуется принцип q×p = const, где q – расход насоса; р –давление.
Внедрение ковша также происходит в два этапа. На первом этапе уравнения динамики процесса внедрения имеют вид (3.14) – (3.15) и после аналогичных преобразований сводятся к виду (3.17). Величина тягового усилия Tдк, приведённая к начальной окружности ведущей звёздочки rзв, определяется также соотношением: