Где  ,
,
 . (2.7)
. (2.7)
![]() - матрица жесткости элемента,
- матрица жесткости элемента, ![]() - вектор узловых сил.
- вектор узловых сил.
Строится функционал энергии для всего тела как сумма значений энергии по всем элементам. При этом считается, что перемещения узлов, принадлежащих разным элементам, одинаковы для всех прилегающих элементов. Физически это означает выполнение условий неразрывности поля перемещений во всей области тела. После выполнения операций сборки получим
 . (2.8)
. (2.8)
Здесь вектор ![]() включает в себя узловые перемещения всего тела, матрица
включает в себя узловые перемещения всего тела, матрица ![]() называется матрицей жесткости всего тела и состоит из суммы матриц
называется матрицей жесткости всего тела и состоит из суммы матриц ![]() , вектор
, вектор ![]() - вектор внешних сил, состоящий из суммы поэлементных сил
- вектор внешних сил, состоящий из суммы поэлементных сил ![]() и заданных сосредоточенных нагрузок.
и заданных сосредоточенных нагрузок.
В соответствии с методом Ритца необходимо найти такой вектор ![]() , который дает минимум энергии Э. Как известно необходимым и достаточным условием минимума полной энергии является равенство нулю ее первой вариации
, который дает минимум энергии Э. Как известно необходимым и достаточным условием минимума полной энергии является равенство нулю ее первой вариации
![]() , (2.9)
, (2.9)
Откуда в силу симметрии матрицы ![]() получим алгебраическую задачу
получим алгебраическую задачу
![]() . (2.10)
. (2.10)
Решая эту систему, находим вектор ![]() , который однозначно определяет поле перемещений и позволяет найти распределение напряжений в теле, что и является конечной целью задач теории упругости.
, который однозначно определяет поле перемещений и позволяет найти распределение напряжений в теле, что и является конечной целью задач теории упругости.
Различие МКЭ и метода Ритца состоит в особенности задания аппроксимации, а именно: в МКЭ она определяется поэлементно и неизвестными параметрами являются узловые перемещения, тогда как в классическом методе Ритца неизвестные параметры ![]() не имеют явного физического смысла.
не имеют явного физического смысла.
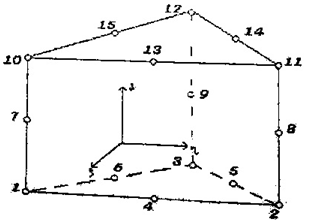
Приведем две квадратичные аппроксимации: двадцатиузловой параллелепипед и пятнадцати узловая призма. Они принадлежат классу Сирендиповых аппроксимаций, так как имеют узлы только на ребрах.
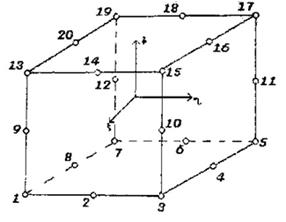
Пробные функции для первого из них имеют вид неполного триквадратичного полинома, то есть
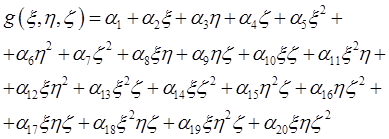 (2.11)
(2.11)
Функции формы для (2.11) получаются следующими:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() (2.12)
(2.12)
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Для квадратичной призмы аппроксимирующий полином будет иметь вид: