Расчетные схемы.
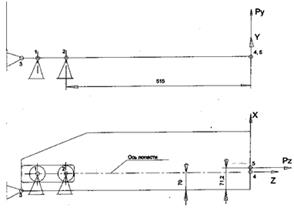
Рис. 1.0
Расчетная схема приведена на рис. 1.0. Конструкция шарнирно закреплена в центральных точках подшипников 1 и 2, и закреплена от вращения вокруг оси лопасти в точке 3.
Расчет проводится на случай нагружения: максимальная нагрузка в плоскости взмаха в полете на режиме висения (см. таблицу 1.2).
Таблица 1.2
|
(к рис. 1.0) |
Рх, кгс |
Ру, кгс |
Рz, кгс (в т. 5) |
|
Величина нагрузки |
0 |
0 |
6860 |
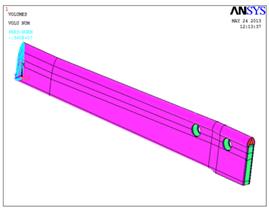
Построение трехмерной модели осуществлялось по чертежу 333.3950.1100 СБ.
Схематично на рис. 1 показан лонжерон лопасти. Длина конструкции 661 см. Конструкция имеет характерные поперечные сечения (рис. 1.2-1.4)
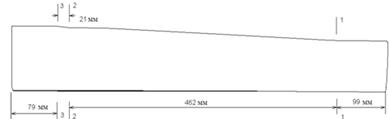
Рис. 1.1
Метод конечных элементов
С точки зрения практики расчета сложных конструкций матричными методами, МКЭ является естественным распространением методов расчета стержневых систем на задачи механики сплошной среды. Это объясняется единством методологии классических методов строительной механики и МКЭ, которая сводится к расчленению исходной конструкции на отдельные части, как правило более простой структуры, механическое поведение (процесс деформирования) которых легко описывается, а затем к объединению их вновь в единую конструкцию путем выполнения условий равновесия и сплошности. С другой стороны, МКЭ можно трактовать как специфическую форму метода Ритца приближенного решения задач механики деформируемого твердого тела, что дает ключ к теоретическому обоснованию его основных положений. В настоящей работе будем придерживаться вариационной постановки задач МКЭ: либо как задач минимизации функционала энергии, либо как решение вариационных уравнений равновесия (движения).
Вариационная постановка задач теории упругости
Для единицы объема упругого тела, ориентированного вдоль произвольно выбранной декартовой системы координат ![]() ,
, ![]() ,
, ![]() , удельная потенциальная энергия деформации записывается в виде
, удельная потенциальная энергия деформации записывается в виде
 (1.1)
(1.1)
Введем вектор деформаций ![]() и вектор напряжений
и вектор напряжений ![]()
![]()
![]() . (1.2)
. (1.2)
Тогда выражение (1.1) можно записать
 (1.3)
(1.3)
Потенциальная энергия деформации, накопленная телом, определяется в виде интеграла по всему объему тела ![]()
 (1.4)
(1.4)
Закон Гука запишем в матричном виде через матрицу упругости (матрицу упругих постоянных) ![]() :
:
![]() . (1.5)
. (1.5)
Тогда выражение потенциальной энергии деформации можем записать
 . (1.6)
. (1.6)
Работу внешних сил запишем в матричном виде. Для этого введем вектор перемещений
![]() (1.7)
(1.7)
Где ![]() - проекции вектора перемещений вдоль осей
- проекции вектора перемещений вдоль осей ![]() ,
, ![]() ,
, ![]() , вектор массовых сил
, вектор массовых сил ![]()
![]() (1.8)
(1.8)
и вектор поверхностных сил ![]() , действующий на части поверхности
, действующий на части поверхности ![]() ,
,