![]() (1.9)
(1.9)
Тогда работа внешних сил может быть записана в виде
 (1.10)
(1.10)
Полная энергия (функционал Лагранжа) системы определяется как
![]() (1.11)
(1.11)
Откуда, с учетом (1.6) и (1.10), получим окончательное выражение
 . (1.12)
. (1.12)
В соответствии с общими теоремами механики, истинное состояние равновесия тела соответствует минимуму полной энергии, то есть задача сводится к поиску такого вектора ![]() , и как следствие
, и как следствие ![]() ,
, ![]() , которые дают
, которые дают ![]() . Уравнениями Эйлера этой вариационной задачи являются уравнения равновесия и статические граничные условия.
. Уравнениями Эйлера этой вариационной задачи являются уравнения равновесия и статические граничные условия.
МКЭ как метод Ритца.
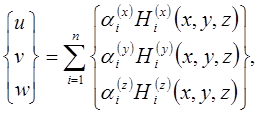
Одним из главных моментов в методе Ритца минимизации функционала энергии является построение поля перемещений в виде разложений по некоторой системе координатных функций
 (2.1)
(2.1)
Которые должны удовлетворять кинематическим граничным условиям. В классическом методе Ритца эти функции ![]() определяются во всей области и должны обладать свойством полноты. По сути дела (2.1) есть аппроксимация вектора перемещений
определяются во всей области и должны обладать свойством полноты. По сути дела (2.1) есть аппроксимация вектора перемещений ![]() , определенная сразу во всей области. Здесь выявляется главная трудность поиска решения в виде (2.1), а именно: сложность построения функций
, определенная сразу во всей области. Здесь выявляется главная трудность поиска решения в виде (2.1), а именно: сложность построения функций ![]() для областей неканонической формы. Чтобы избежать этих осложнений, было предложено разбивать исходную область на отдельные части, геометрически более простой структуры, внутри которых строить аппроксимации
для областей неканонической формы. Чтобы избежать этих осложнений, было предложено разбивать исходную область на отдельные части, геометрически более простой структуры, внутри которых строить аппроксимации ![]() значительно проще. Однако здесь возникает новая трудность, связанная со стыковкой этих отдельных сегментов в плане выполнения условий непрерывности перемещений (уравнение равновесия удовлетворяются вариационно). Выходом было предложение принять в качестве неопределенных коэффициентов разложений
значительно проще. Однако здесь возникает новая трудность, связанная со стыковкой этих отдельных сегментов в плане выполнения условий непрерывности перемещений (уравнение равновесия удовлетворяются вариационно). Выходом было предложение принять в качестве неопределенных коэффициентов разложений ![]() значений компонент перемещений
значений компонент перемещений ![]() в некоторой системе точек (узлов), как правило лежащих на границах стыкуемых элементов. В результате получается такая модификация метода Ритца, которая называется метод конечных элементов.
в некоторой системе точек (узлов), как правило лежащих на границах стыкуемых элементов. В результате получается такая модификация метода Ритца, которая называется метод конечных элементов.
Таким образом, МКЭ состоит из следующих основных этапов:
Разбиение исходной области на отдельные части (элементы) простой геометрической структуры (для двумерных задач это треугольники и четырехугольники).
На границах между отдельными элементами, а в случае необходимости и внутри элементов вводятся точки (узлы), перемещения которых ![]() далее считаются основными неизвестными.
далее считаются основными неизвестными.
Для отдельного конечного элемента строится выражение функционала энергии как функции перемещений узлов, принадлежащих только этому конечному элементу. Схема здесь следующая. Рассмотрим некоторый m-ый элемент. Обозначим через вектор ![]() - вектор узловых перемещений m – ого элемента
- вектор узловых перемещений m – ого элемента
![]() . (2.2)
. (2.2)
Введем аппроксимации внутри элемента
![]() , (2.3)
, (2.3)
Где ![]() содержит в себе некоторые функции, ее элементами будут степенные функции, то есть полиномы. По (2.3) можем вычислить вектор деформации(1.2) в виде
содержит в себе некоторые функции, ее элементами будут степенные функции, то есть полиномы. По (2.3) можем вычислить вектор деформации(1.2) в виде
![]() . (2.4)
. (2.4)
Подставляя (2.3), (2.4) в (1.12) получим выражение энергии на элементе
![]() . (2.5)
. (2.5)
Так как параметры ![]() постоянные на элементе, то (2.5) можем записать в виде
постоянные на элементе, то (2.5) можем записать в виде
 , (2.6)
, (2.6)