где: Т - время реакции водителя на возникновение опасности для движения и приведения в действие тормозной системы ТС (до начала образования следов торможения), с
![]()
Теперь искомое неравенство может быть представлено таким образом:
 (3.7)
(3.7)
Как нам уже известно, при соблюдении этого неравенства эксперт должен констатировать, что в такой дорожной ситуации при допустимой скорости движения водитель ТС располагал технической возможностью предотвратить наезд, своевременным снижением скорости вплоть до полной остановки.
При изменении знака неравенства (>) на обратный (<), для решения поставленной задачи может быть достаточным определение величины ΔSn по формуле:
 (3.8)
(3.8)
Необходимо отметить, что в данном варианте не имеет принципиального значения, какой частью ТС (передней или боковой стороной кузова, кабины) совершен наезд.
На величину Sю’ это обстоятельство никоим образом не влияет. Потому не повлияет и на конечный результат.
Вариант 3. ДТП при тех же обстоятельствах, что и в варианте 1. С единственным уточнением. Наезд совершен в зоне действия дорожного знака 3.24 «Ограничение максимальной скорости» на расстоянии S от него.
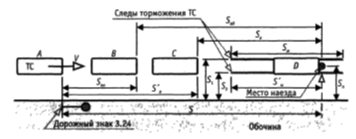
Рисунок 3.2 - Схема места ДТП в зоне действия знака 3.24 «Ограничение максимальной скорости»
В этом варианте эксперту предоставлена полная информация об обстоятельствах ДТП, позволяющая без каких-либо оговорок и допущений создать математическую модель этого события. И проанализировать динамику его развития как при фактической, так и при допустимой скорости движения ТС.
Прежде, как и в первом варианте, нужно по фактической скорости (Vф) определить величину удаления ТС от места наезда в момент обнаружения опасности для его движения (Sа). В общем случае это можно выполнить, например, по формуле:
 (3.9)
(3.9)
Этим расчетом определяется не только удаление ТС от места наезда в конкретный момент времени, но и расстояние (Sа'), которое ТС должно было преодолеть от дорожного знака 3.24 к моменту обнаружения опасности для его движения Sa’ = S – Sa.
Время движения ТС на данном участке (Sa') при фактической скорости определяется расчетом по формуле:
 (3.10)
(3.10)
где: Тпп - искомая величина времени движения ТС на участке от дорожного знака до момента обнаружения препятствия для его движения при фактической скорости, с;
S - расстояние от дорожного знака 3.24 до места наезда, м.
Остальные величины определены ранее.
При допустимой скорости движения за то же самое время Тпп транспортное средство преодолеет от дорожного знака 3.24 расстояние Snn (см. схему ДТП), которое может быть определено расчетом:
 (3.11)
(3.11)
Этим же расчетом определено и положение ТС в момент обнаружения препятствия на пути движения при допустимой скорости не только относительно дорожного знака 3.24, но и относительно места наезда. Если из величины S вычесть расстояние Snn.
 (3.12)
(3.12)
здесь: Sad - удаление ТС от места наезда в момент обнаружения препятствия для его движения при допустимой скорости, м.
Подставив в эту формулу значение Тпп, получим:
 (3.13)
(3.13)
Формула (3.13) представляет собой упрощенный вариант решения, поскольку не учитывает процесс снижения скорости ТС перед дорожным знаком, который также определяет конечное значение величины Sad. Принимаем движение ТС на участке снижения скорости равнозамедленным. Тогда время и расстояние, необходимые для снижения скорости ТС с Vф до Vд можно определить таким образом