В полете лопасти нагружаются воздушными и массовыми (инерционными) силами. Для упрощения представления о распределении нагрузок их можно разделить на две группы:
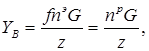
1 Нагрузки, действующие в плоскости наименьшей жесткости лопасти в плоскости взмаха (рисунок 1.12, а). К ним относятся: воздушная нагрузка Y в; нагрузка от веса конструкции лопасти Y к; центробежная сила Nцб а также инерционная сила Y β от углового ускорения при маховом движении лопасти относительно горизонтального шарнира. Уравновешиваются эти нагрузки реакцией R втулки в горизонтальном шарнире;
2 Нагрузки, действующие в плоскости вращения винта (рисунок 1.12, б). К ним относятся: лобовое сопротивление Qa (направлено против вращения, по касательной к окружности, которую описывает центр давления лопасти); инерционная сила Nин от колебаний относительно вертикального шарнира (дающая момент, направленный противоположно угловому ускорению); центробежная сила Nцб, и кориолисова сила Fкop. от махового движения лопасти относительно горизонтального шарнира.
Для прочности лопасти наиболее существенными являются нагрузки обеспечивающие равновесие моментов относительно горизонтального шарнира и действующие в плоскости ее наименьшей жесткости – плоскости взмаха.
Величина и распределение погонных нагрузок по размаху лопасти зависят от ряда факторов: аэродинамических характеристик профиля, установочного угла, формы лопасти в плане, крутки лопасти и скорости потока, ее обтекающего, от азимутального положения лопасти. Последний фактор приводит к тому, что в отличие от крыла самолета на одном и том же режиме полета величина и распределение нагрузки по размаху лопасти циклически меняются.
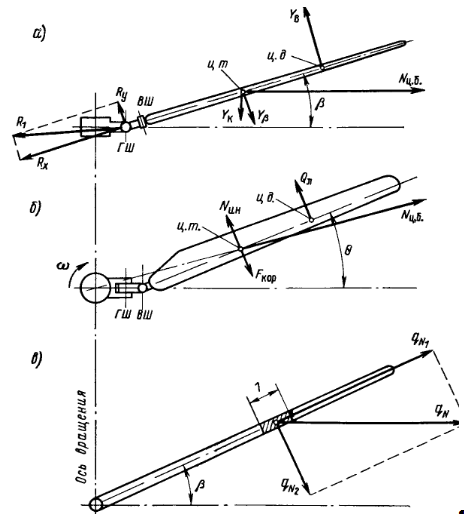
Рисунок 1.12 – Силы, действующие на лопасть несущего винта, где а – в плоскости взмаха; б – в плоскости вращения винта; в – составляющие погонной центробежной силы
Величина воздушной нагрузки, приходящейся на одну лопасть, определяется по формуле 1.1.
 (1.1)
(1.1)
где пэ – эксплуатационная перегрузка; пР – расчетная разрушающая перегрузка; G – вес вертолета; z – число лопастей несущего винта; f – коэффициент безопасности.
Массовые нагрузки представлены нагрузкой от веса лопасти Y к и центробежной силой Nцб.
(1.3)
где rц.т. – радиус центра тяжести, ω – угловая скорость вращения НВ.
Погонные массовые нагрузки от веса лопасти qук и центробежной силы qN.
При расчетах погонную нагрузку qN раскладывают на две составляющие, действующие вдоль и перпендикулярно оси лопасти в плоскости ее наименьшей жесткости
Под действием qN1 лопасть работает на растяжение, qN2 является поперечной нагрузкой лопасти, разгружающей ее от действия аэродинамических сил .
Инерционная нагрузка от махового движения лопасти относительно горизонтального шарнира
Распределение этих сил по радиусу лопасти зависит не только от r и qл, но и от положения лопасти по азимуту (сомножитель d2β/dt2).
Общая погонная нагрузка qу равна сумме всех погонных нагрузок
![]()
Под действием воздушных и массовых сил в сечениях лопасти возникают усилия: поперечные Q и осевые N силы, изгибающие Мизг. и крутящие Мкр моменты.
Практически интегрирование можно заменить суммированием, разбивая лопасть на ряд участков длиной Δr.