Радиусы кривых необходимо увеличивать для обеспечения более высоких скоростей движения поездов.
Расчёты по увеличению радиуса кривой производятся в следующем порядке. На основании исходных данных строится расчётная схема, которая представлена на рисунке 6.4.
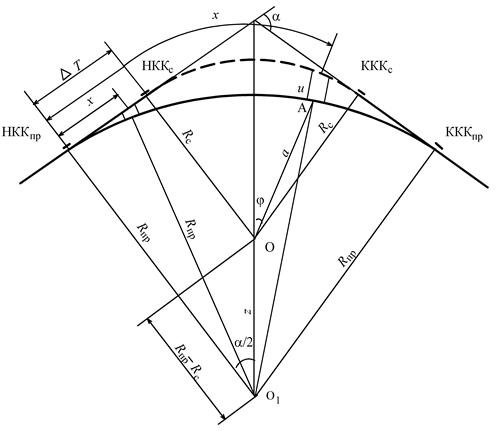
Рисунок 6.4 – Расчетная схема
В соответствии с расчётной схемой определяются: длина проектируемой кривой (Кпр), тангенс проектируемой кривой (Тпр), разность тангенсов (DТ), изменение длины линии(DL), неправильный пикет и пикетажное положение проектируемой кривой, а также нормали (n), т.е. смещение оси существующего пути.
Указанные элементы определяются на основании формул:
- длина проектируемой кривой
Кпр = Rпрaрад; (6.32)
– тангенс проектируемой кривой
Тпр = Rпрtg(a/2); (6.33)
– разность тангенсов
DТ = Тпр – Тс; (6.34)
– изменение длины линии
DL = 2DТ + Кс – Кпр; (6.35)
– неправильный пикет
100 – DL; (6.36)
– начало и конец проектируемой круговой линии
ПК НККпр = ПК НККс – DТ; (6.37)
ПК КККпр = ПК КККс + DТ, (6.38)
где aрад – угол поворота кривой в радианной мере.
Для определения нормалей по первому способу, т.е. с построением угловой диаграммы, строится профильная схема и совмещенная угловая диаграмма (рисунок 6.5).
В соответствии с рисунком 6.5 определение нормалей в характерных точках (на каждой “двадцатке”) производится по формулам:
– на участке от НККпр до НККс
n = х2/ (2Rпр); (6.39)
– на участке от НККс до КККс
n = х2/ (2Rпр) – (х – DТ)2/ (2Rс); (6.40)
– на участке от КККс до КККпр
n = х2/ (2Rпр) – К2с /(2Rс) – (х – DТ – Кс) aрад , (6.41)
где х – расстояние от начала круговой кривой проектируемой (НККпр ) до рассматриваемого сечения.
Исходными данными для расчёта являются: угол поворота, радиус, пикет начала существующей круговой кривой и радиус проектируемой кривой.
В качестве примера приводим расчёт увеличения радиуса кривой с 650 м до 800 м.
Исходные данные
Угол поворота – 31° 23';
радиус существующей кривой – 650 м;
начало существующей круговой кривой – 430+50;
радиус проектируемой кривой – 800 м;
длина существующей кривой – 356,03 м;
конец существующей круговой кривой – 434 + 06,03.
По формулам (6,32 – 6,38) определяем элементы проектируемой круговой кривой, величину неправильного пикета и положение кривой в пикетаже:
Кпр = Rпрaрад= 800∙0,547742 =438,19 м;
Тпр = Rпрtg(a/2)= 800∙0,280930 = 224,74 м;
DТ = Тпр – Тс= 224,74 – 182,60 = 42,14 м;
DL = 2DТ + Кс – Кпр= 2∙ 42,14 + 356,03 – 438,19 = 2,12 м.
Неправильный пикет – 97,88 м;
_НККс ПК 430 +50,00
DТ 42,14
НККпр ПК 430 +07,86
+КККс ПК 434 + 06,03
DТ 42,14
КККпр ПК 434 + 48,17
Подсчет нормалей произведем в табличной форме – таблица 6.3.
Профильная схема и совмещенная угловая диаграмма представлена на рисунке 6.5
Т а б л и ц а 6.3 − Результаты расчетов
|
Пикетаж |
Расстояние х, м |
Расчетная формула |
Величина нормали n,м | ||||
|
ПК |
+ | ||||||
|
430 |
20 |
12,14 |
х2/ (2Rпр) |
0,092 | |||
|
430 |
60 |
52,14 |
х2/ (2Rпр) – (х – DТ)2/ (2Rс) |
1,622 | |||
|
80 |
72,14 |
2,560 | |||||
|
431 |
00 |
92,14 |
3,383 | ||||
|
20 |
112,14 |
4,090 | |||||
|
40 |
132,14 |
4,682 | |||||
|
60 |
152,14 |
5,159 | |||||
|
80 |
172,14 |
5,520 | |||||
|
432 |
00 |
192,14 |
5,766 | ||||
|
20 |
212,14 |
5,896 | |||||
|
40 |
232,14 |
5,911 | |||||
|
60 |
252,14 |
5,811 | |||||
|
80 |
272,14 |
5,595 | |||||
|
433 |
00 |
292,14 |
5,264 | ||||
|
20 |
312,14 |
4,818 | |||||
|
40 |
332,14 |
4,256 | |||||
|
60 |
352,14 |
3,578 | |||||
|
80 |
372,14 |
2,786 | |||||
|
434 |
00 |
392,14 |
1,878 | ||||
|
20 |
412,14 |
х2/ (2Rпр) – К2с /(2Rс) - (х – DТ - Кс) aрад |
1,004 | ||||
|
40 |
432,14 |
0,603 | |||||