![]() ºС;
ºС;
tср − среднее значение температуры;
tmax – максимальная температура данного района, tmax = 35º С;
tmin – минимальная температура данного района, tmin = – 35º С
![]() ;
;
D=10 º С - для 2 контактных проводов.
![]() ºС
ºС
Определение натяжения (![]() ) и стрелы провеса (
) и стрелы провеса (![]() ) несущего троса при беспровесном положении контактного провода.
) несущего троса при беспровесном положении контактного провода.
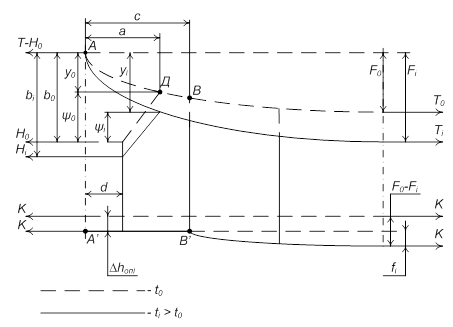
Рис.1. Расчетная схема полукомпенсированной цепной подвески с рессорным тросом.
Н0 − натяжение рессорного троса при беспровесном положении контактного провода;
а − расстояние от оси опоры до точки крепления рессорного троса к несущему тросу, 6 м;
с − расстояние от оси опоры до околоопорной струны, 10 м;
d − расстояние от оси опоры до подрессорной струны, 2 м;
Ψ0 − стрела провеса рессорного троса при беспровесном положении контактного провода.
Определение натяжения несущего троса при беспровесном положении контактного провода.
Решим уравнение состояния, приняв за режим с индексом 1-режим минимальной температуры, а за режим с индексом i-режим беспровесного положения контактного провода при ![]() :
:
![]()
![]()
![]()
![]()
t1=tmin=-35°C;
![]() ;
;
Е=127500×106 Па=12750×106 ![]() , модуль упругости НТ;
, модуль упругости НТ;
![]() , фактическое сечение НТ;
, фактическое сечение НТ;
αТ − коэффициент температурного линейного расширения, для медного провода равен 17×10-6 1/°С;
![]()
![]()
αт×Ет×Sт = 17 × 10-6 × 12750 × 94 =20,95
Подставив эти значения в уравнение, при этом приняв ϑ0 = -10ºС, получим натяжение несущего троса при беспровесном положение контактного провода.
![]()
Решая кубическое уравнение, получим: T0 = 1401,6 даН;
Определение стрелы провеса несущего троса при бес провесном положении контактного провода:
Стрела провеса рессорного троса:
![]()
а =6 м − один контактных провод, подвеска полукомпенсированная;
с = 10 м, − один контактных провод, подвеска полукомпенсированная;
d = 2 м − один контактных провод, подвеска полукомпенсированная;
gк − нагрузка от силы тяжести контактного провода, равная 0,873![]() ;
;