Страница 3
• несоответствие используемой методики контролируемому объекту;
• нарушение правил аттестации МВИ, установленных ГОСТ Р 8.563-96;
• неправомерность использования СИ, МВИ и методов испытаний или стандартных образцов;
• систематическое получение результатов испытаний и измерений с нарушением требований методик;
• отсутствие необходимых СИ, испытательного и вспомогательного оборудования, стандартных образцов, реактивов и материалов или несоответствие их установленным требованиям:
• недостаточная укомплектованность квалифицированными кадрами;
• несоответствие помещений лаборатории установленным требованиям.
Схема крепления и устройство оптического измерителя соосности «РКР090»
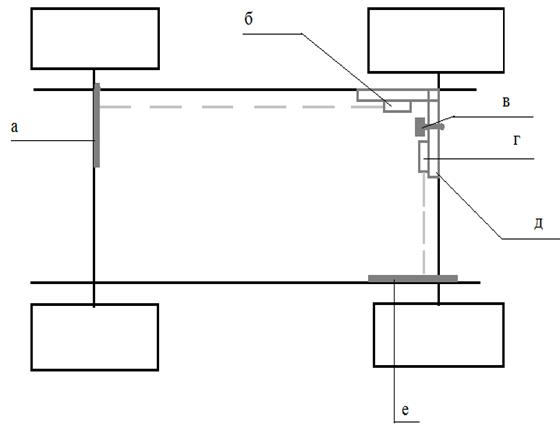
а - шкала осевого смещения, б - лазерный указатель осевого смещения, в – прижимной винт, г – лазерный указатель углового смещения, д – универсальный угловой кронштейн, е – шкала углового смещения
Локальная поверочная схема измерительной линейки
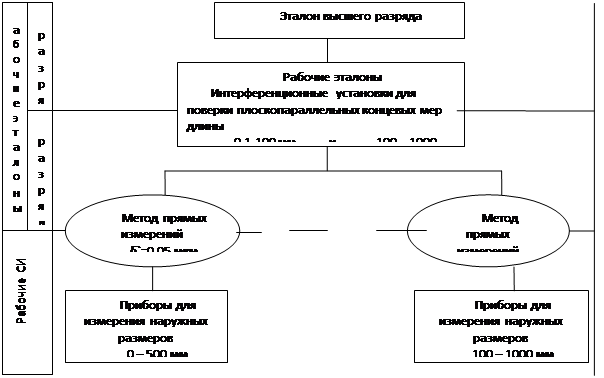
Примечания:
L - числовое значение длины в метрах
δ` - погрешность передачи размера единицы
Автомобиль-самопогрузчик НИИАТ-П404
Выпускается Рижским ремонтно-механическим заводом. Предназначен для перевозки автомобильных контейнеров массой брутто 0,625 и 1,25т и других штучных грузов.
На платформе автомобиля ГАЗ-53А смонтирован портальный кран с гидравлическим приводом, для чего боковые борта сдвинуты внутрь платформы на 120мм и жёстко закреплены.
Параметры
НИИАТ-П404
Грузоподъёмность, кг
3350
"кранового оборудования, кг
1250
Собственна ...
Подбор технологического оборудования
Как правило, оборудование, необходимое по технологическому процессу для проведения работ текущего ремонта, принимается в соответствии с технологической необходимостью выполняемых с его помощью работ, так как оно используется периодически и не имеет полной загрузки за рабочую смену Варианты выбора оборудования представлены в таблице.
Подбор технологического оборудования
Наименование работ
Варианты технологического оборудования
Выбранн ...
Грузовая система танкера
Чтобы обеспечить сохранность нефтегрузов, их прием и выкачку Последующей очисткой танков, нефтеналивные суда оборудуют специальными системами: грузовой, зачистной, подогрева вязких нефтепродуктов, газоотводной, зачистки и мойки танков. Кроме того, к специальным относят систему замера количества груза и систему инерт-газов. На танкерах применяют груз. Системы 2-х типов: трубопроводная и клинкетная. Трубопроводная, состав: груз.баки, имеют конич ...