Компас КМ-145 выпускает ОАО "КИПЗ" (Приборостроительный завод г.Катав-Ивановск Челябинской обл.). Магнитный компас КМ-145 имеет несколько вариантов комплектации, в том числе с электрической дистанционной передачей курса на репитеры гирокомпасного типа. Этот компас предназначен для установки на судах морского флота. Он имеет восемь модификаций:
КМ-145-1 — магнитный компас без дистанционной передачи;
КМ-145-3 — магнитный компас с электрической дистанционной передачей курса на ре-питеры гирокомпасного типа;
КМ-145-5 — магнитный компас с оптической дистанционной передачей курса;
КМ-145-7 — магнитный компас, имеющий обе дистанционные передачи курса.
Модификации КМ-145-2, КМ-145-4, КМ-145-6 и КМ-145-8 аналогичны указанным выше четырем вариантам соответственно, но дополнительно снабжены компенсаторами электромагнитной девиации.
Предусмотрены следующие варианты определения курса судна: отсчет курса непосредственно по картушке основного прибора; отсчет курса с экрана оптического репитера, связанного с основным прибором при помощи стекловолоконного гибкого жгута; считывание курса судна со шкалы репитера, связанного с основным прибором дистанционной электрической передачей на сельсинах.
Состав комплекта компаса КМ-145:
— основной прибор (прибор 52): служит для определения курса судна и выработки сигнала дистанционной передачи. Он состоит из датчика курса и компенсаторов девиации. Его устанавливают на верхнем мостике судна;
— центральный прибор (прибор 50): обеспечивает усиление и преобразование сигнала дистанционной передачи, поступающего от датчика курса. Его устанавливают в ходовой рубке;
— регулировочное устройство (прибор 3): предназначено для регулировки силы тока в обмотках компенсатора электромагнитной девиации. Его также устанавливают в ходовой рубке;
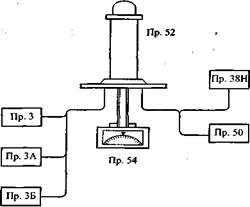
— приборы питания (прибор ЗА, прибор ЗБ): обеспечивают выработку напряжений, необходимых для питания электрической схемы. Их устанавливают в ходовой рубке;
— оптический репитер (прибор 54): служит для дублирования показаний датчика курса на оптическом экране, установленном в ходовой рубке. Считывание курса с экрана оптичес-кого репитера возможно одновременно несколькими лицами;
— репитеры гирокомпасного типа (прибор 38Н): могут быть в количестве до 3 штук. Предназначены для визуального считывания курса судна. Их устанавливают в ходовой, штурманской рубках или других помещениях судна.
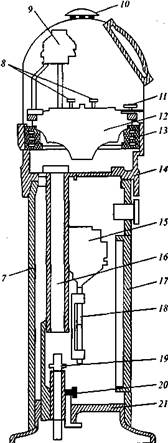
Прибор 52 представляет собой нактоуз 7, сверху закрываемый колпаком 5 с вентиляционным грибком 10. В верхней части 14 нактоуза расположены: датчик курса 12, компенсатор электромагнитной девиации 13 и осветитель 9. При пеленговании винты 8 отворачивают,
фиксатор 11 оттягивают и осветитель 9 с кронштейном сдвигают в сторону на угол 10°.
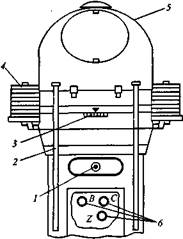
В средней части нактоуза расположены: девиационный прибор 15 для компенсации полукруговой и креновой девиации, а также дополнительные вертикальные креновые магниты 18. Вдоль всего нактоуза проходит вертикальная труба 16 оптической передачи, в которой находится объектив 19. В нижнем отверстии трубы закреплен входной торец свето-провода. Патрон с силикагелем 20 поглощает влагу и предотвращает запотевание объектива и светопровода. В нактоузе есть окно, закрытое крышкой 17. В девиационном приборе находятся три пары поворотных магнитов, складывающихся в виде ножниц: продольные для компенсации силы ВλН, поперечные для компенсации силы СλН и вертикальные — для компенсации вертикальной силы Z, создающей креповую девиацию. Ручки управления (В, С и Z), с помощью которых осуществляют раздвижку магнитов, выведены в сторону окна. На рисунке они отмечены позицией 6. Снаружи нактоуза, в его верхней части, закреплены безындукционные компенсаторы четвертной девиации 4. Они представляют собой набор пластин из мягкого железа, расположенных в пеналах. Кронштейн с компенсаторами 4 может быть развернут вокруг вертикальной оси в пределах ±15°. Угол поворота фиксируют по шкале 3. На нактоузе закреплен широтный компенсатор (флиндерсбар), состоящий из двух вертикальных стержней 2. Потенциометр 1, расположенный на корпусе прибора, служит для регулировки освещенности чувствительного элемента.