Назначение и разновидности механизма подъема
Механизм подъема предназначен для подъема и опускания груза на необходимую высоту с заданной скоростью и удержания груза на любой, требуемой условиями технологического процесса, высоте.
Подъемный механизм может быть самостоятельным (тельфер, таль) или входить в состав другой перегрузочной установки, например в состав крана.
Механизм подъема включает в себя двигатель, передаточный механизм (редуктор или редуктор и открытую передачу), тормоз, грозовой барабан, блоки, тяговый орган (чаще всего стальной канат) и грузозахватное устройство (крюк, грузовая подвеска, грейфер и т.п.).
Входящие в состав кранов механизмы подъема грузов (грузовые лебедки) в зависимости от рода перегружаемого груза подразделяются на грейферные и крюковые лебедки.
Крюковые подъемные лебедки обычно имеют один электродвигатель, один или два грузовых барабана. При этом барабаны могут вращаться только одновременно и без изменения направления вращения относительно друг друга.
В зависимости от количества этих конструктивных элементов крюковые лебедки называются одномоторными однобарабанными или одномоторными двухбарабанными.
Конструктивное исполнение крюковых лебедок может быть самым различным в зависимости от количества барабанов и передаточных устройств (рис. 1. а, б, в).
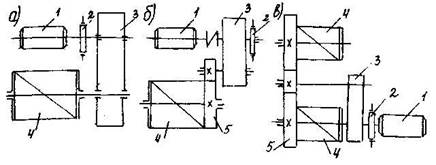
Рис.6. Схемы одномоторных крюковых лебедок:
1 - электродвигатель; 2 - тормоз: 3 - редуктор: 4 - барабан: 5 – открытая передача.
Грейдерные (двухбарабанные) лебедки различают одномоторные и двухмоторные, позволяющие получить различные сочетания вращения барабанов, что необходимо для обеспечения работы грейфера. В грейферных лебедках кранов один барабан является замыкающим, а второй поддерживающим, аналогично и называются лебедки - одна замыкающая, а вторая - поддерживающая.
В процессе работы грейферного крана возможны следующие сочетания вращения барабанов:
- при подъеме и опускании грейфера барабаны обеих лебедок вращаются синхронно;
- при зачерпывании груза грейфером барабан замыкающей лебедки вращается в сторону подъема, барабан поддерживающей лебедки - на опускание, обеспечивая слабину каната по мере заглубления грейфера;
- при раскрытии грейфера барабан замыкающей лебедки вращается на опускание, а барабан поддерживающей заторможен, иногда для более быстрого раскрытия грейфера барабаны лебедок вращают в разные стороны, т.е. замыкающий на спуск, а поддерживающий - на подъем.
Одномоторные грейферные лебедки (рис. 2) имеют один двигатель, обеспечивающий различное сочетание вращения барабанов посредством фрикционных муфт и тормозов. Двигатель жестко связан с замыкающим барабаном, поддерживающий же барабан присоединяется к двигателю посредством управляемой фрикционной или планетарной муфты.
Одномоторные лебедки менее совершенны и более сложны в управлении, в них совмещение таких операций, как подъем-опускание и раскрытие-закрытие грейфера невозможно (рис. 2.а).
Двухмоторные лебедки позволяет избежать этих недостатков, хотя они сложнее и дороже одномоторных лебедок, но повышение оперативности и производительности кранов окупает дополнительные затраты. В настоящее время двухмоторные лебедки являются основным типом грейферных лебедок кранов. Из большого разнообразия двухмоторных лебёдок наибольшее применение имеют лебедки, состоящие из двух нормальных крановых крюковых лебедок с независимыми двигателями (рис. 2. б), а также лебедки с планетарной связью между барабанами.
Главным требованием, предъявляемым к работе двухмоторных лебедок является равномерность распределения нагрузок на канаты и синхронность вращения барабанов с целью обеспечения равной скорости выборки канатов.
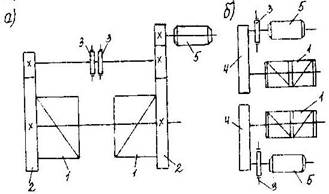
Рис. 7. Схемы грейферных лебёдок:
а – одномоторная; б – двухмоторная:
1 – барабан; 2 – открытая передача; 3 – соединительная муфта с тормозным шкивом; 4 – редуктор; 5 – двигатель.
В зависимости от взаимного расположения двигателя и барабана различают следующие компоновочные схемы лебедок механизма подъёма: П - образную, Z - образную и соосную, которые принимаются с учетом конкретных условий работы и наличия производственных площадей (рис. 3).
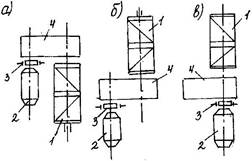
Рис. 8. Компоновочные схемы лебедок:
а – «П» - образная; б - "Z"-образная; в - соосная. 1 – барабан; 2 – электродвигатель; 3 – тормоз; 4 - редуктор.
В механизмах подъема применяются нормально замкнутые тормозные устройства с автоматическим управлением.
Исходные данные
Грузоподъёмность ![]() ;
;
Скорость поднимания груза ![]() ;
;