Страница 2
Нагрузка от силы тяжести цепной подвески:
gП=gТ+(gК+0,1)·nК;
gп =0,585 + (0,740 + 0,1) ·1 = 1,325 даН/м
Т0 = 0,8*Тmax = 0,8*1700=1360 даН для полукомпенсированной цепной подвески;

l0 = hк - F0 = 1,8 - 0,459 = 1,341 м
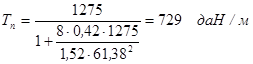
Приведенное натяжение с учетом изоляторов:
 ,
,
Тi = 0,75*Тmax = 0,75*1700=1275 даН,
т.к. подвеска полукомпенсированная;
hи - длина гирлянды изоляторов, равная 0,42 м для неизолированных консолей с двумя подвесными изоляторами;
Результирующая нагрузка, действующая на несущий трос:


Рассчитаем допустимую длину пролета при Рс = -0,017 и к*1= 1,12:

Сравним  и
и 
Принимаем lдоп=59 м.
Расчёт геометрических характеристик и компоновка крыла
Геометрические характеристики крыла определяем исходя, из взлётной массы и удельной нагрузки на крыло самолёта.
Находим площадь крыла:
Bычисляем размах крыла:
Oпределяем корневую хорду крыла:
Oпределяем концевую хорду крыла:
Бортовая хорда:
Принимаем кессонное двухлонжеронное крыло. Относительное положение лонжеронов в рыле по хорде:
;
где - расстояние i-го лонжерона от носа крыла.
Для крыла с двумя лонжеронами: , .Это опреде ...
Определение структуры и параметров объекта управления
В состав объекта управления входит двигатель постоянного тока серии Д-12, ШИП в цепи возбуждения с частотой коммутации 5кГц, тиристорный стабилизатор тока якоря, рабочий орган упруго связанный с двигателем.
Технические данные двигателя Д12:
Номинальная мощность 2.5кВт
Напряжение питания якоря 220В
Напряжение питания ОВ 220В
Номинальный ток якоря 14.6А
Номинальная частота вращения 1140 об/мин
Максимальная частота вращения 3600 об/мин
Мом ...
Разрез двигателя
Продольный разрез двигателя представлен на рисунке 3, поперечный- на рисунке 4. Так же на рисунке 5 представлен механизм газораспределения.
Рисунок 3 - Продольный разрез двигателя автомобиля ГАЗ-24.
Рисунок 4 - Поперечный разрез двигателя автомобиля ГАЗ-24
Рисунок 5 - Схема механизма газораспределения двигателя автомобиля ГАЗ-24 ...