Если разделить обе части равенства (10) на силу тяжести  , то получим уравнение силового баланса в безразмерной форме:
, то получим уравнение силового баланса в безразмерной форме:
 . (18)
. (18)
Величину ускорения j можно найти из решения уравнения (18):
 , (19)
, (19)
где:  – коэффициент учета вращающихся масс автомобиля:
– коэффициент учета вращающихся масс автомобиля:
 (20)
(20)
где: δВР1 – коэффициент учета вращающихся масс трансмиссии автомобиля приведенные к маховику двигателя;
δВР2 – коэффициент учета вращающихся масс приведенных к колесам;
с учетом, что имеем:
имеем:

Расчеты производятся по формуле (19) для каждой передачи и приводятся в таблице П. 3. Далее строится зависимость  (рис. 5).
(рис. 5).
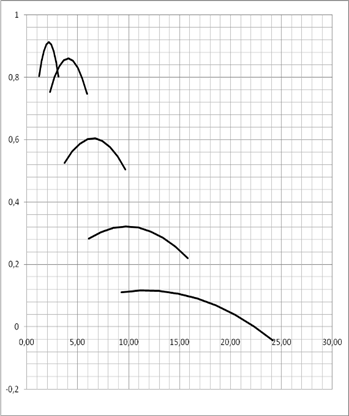
Рис. 5. Зависимость ускорения от скорости движения автомобиля КАМАЗ 43105:
1–5-зависимость j=f(v) на соответствующих передачах.
Перечень оборудования тележечного участка
На тележечном участке располагается следующее оборудование:
- толкатель колесных пар;
- конвейер для транспортировки тележек;
- моечная машина;
- механизм для раздвижки боковин;
- устройство для удаления заклепок;
- гидроскоба;
- кантователь боковой рамы для дефектоскопирования;
- магнитный дефектоскоп;
- кантователь боковин для наплавки;
- кантователь надрессорной балки для дефектоскопирования;
- сварочный автомат для наплавки накло ...
Предмет и цели деятельности РДАУП «Автобусный парк № 2»
Учредитель РДАУП «Автобусный парк № 2» и его вышестоящая организация – Республиканское автотранспортное унитарное предприятие (РАУП) «Гомельоблавтотранс».
Местонахождение РДАУП «Автобусный парк № 2»: ул. Ветровая, 1, 247760 г. Мозырь, Гомельская область, Республика Беларусь.
Предприятие основано на республиканской государственной форме собственности.
РДАУП «Автобусный парк № 2» свою производственно-финансовую деятельность осуществляет в соот ...
Порядок расчета
себестоимости, расходов и доходов на перевозку пассажиров
При расчете себестоимости перевозок пассажиров затраты группируются по следующим статьям[10]:
1) постоянные:
заработная плата персонала по организации и осуществлению перевозок (зарплата водителей, руководителей, специалистов и служащих);
отчисления в бюджетные и внебюджетные фонды от средств оплаты труда;
общехозяйственные или накладные расходы (на содержание и ремонт зданий, инвентаря, канцелярские и другие расходы);
2) переменные:
техн ...