Гирокомпас выполнен в виде компактного моноблока. Все электронные компоненты представляют собой вставные модули. Цифровая информация о курсе получается как абсолютное значение 12-битовой кодировки. В качестве гироблока в этой системе применен чувствительный элемент (гиросфера) гирокомпаса "Navigat X".
Модель SR-180 MK1 имеет блок управления с информационным дисплеем. Для работы в тяжелых морских условиях рекомендуется использовать модель SR-180 MK1, mod. 7.
Ввод информации о скорости и широте может осуществляться автоматически или вручную.
Предлагается несколько вариантов конфигурации систем гирокомпаса SR-180 МК1:
базовая система GM — состоит из гирокомпаса SR-180 МК1 и магнитного гирокомпаса;
базовая модель GM-C — состоит из системы GM и монитора;
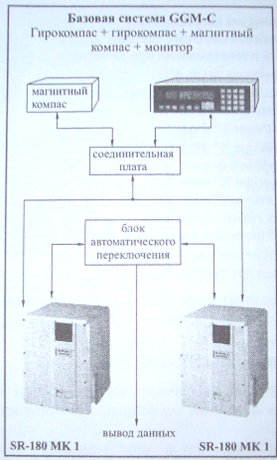
базовая система GGM — состоит из двух гирокомпасов SR-180 МК1 и магнитного компаса;
базовая система GGM-C — включает систему GGM и монитор (смотри рисунок).
Эксплуатационные характеристики гирокомпаса соответствуют резолюциям ИМО А.424 (XI) и А.821 (19).
Основные технические характеристики гирокомпаса
Углы прокачки по крену и дифференту:
SR-180 MK1 mod. 7…………………………±900;
SR-I80 MK1 mod. 1…………………………………………….±400;
точность:
динамическая погрешность…………………………………… < 0,10;
cтатическая погрешность………………. < 0,40 (среднеквадратическая);
независимость от перебоев в судовой сети - автоматическое переключение на 24 В в соответствии с требованиями ГМССБ;
время прихода в меридиан………………………………………… .≤ 3 ч;
быстродействие следящей системы…………………………… >100°/с;
наработка на отказ………………………………………………….40000 ч;
погрешность гирокомпаса после
3-минутного перерыва в электропитании…………………………….≤ 2°;
информационный дисплей…………………………………… .цифровой;
поправки к курсу в гирокомпасах:
типовой комплектации — для компенсации скоростной девиации;
с прибором самостоятельной поставки — для компенсации скоростной и инерционной
девиаций;
Входные данные:
координаты…………………………………… .….1 ввод NMEA 0183;
скорость……. 1 ввод NMEA 0183 или 200 импульсов на милю;
курс:
по магнитному компасу
из цифрового выхода……………………………… .1 ввод, sin К, cos К;
по электронному (индукционному) компасу…….1 ввод, NMEA 0183.
Выходные данные:
NMEA 0183 — 12 выводов: курс по гирокомпасу, курс по магнитному компасу, угол поворота судна на репитеры (цифровые);
NMEA 0183 — 2 вывода: курс по гирокомпасу, курс по магнитному компасу, угол поворота, координаты, скорость;
RS 422 — 3 вывода (то же);
RS 422 Fast -1 вывод: курс по гирокомпасу, курс по магнитному компасу, угол поворота;
RS 422 Super Fast — 1 вывод (то же);
RS 422 — 1 вывод для регистратора пути (VDR): путевой угол, положение руля, время, ре-жим управления курсом, скорость судна, координаты.
К приборам и устройствам дополнительной поставки относятся:
- аналоговые и цифровые репитеры;
- регистратор пути (VDR);
- магнитный компас с цифровым выходом;
- датчик положении руля;
- электромагнитный лаг;
- высокоскоростной порт передачи данных на авторулевой;