Страница 2
Расчет и построение эллипса погрешностей
4.2(оперативное время 16.30)- по двум пеленгам
1. Рассчитаем смещение линий положения по формулам
 и
и  ,
,
где g1 =57,3 / D1, g2 =57,3 / D2.
D1=22,5 миль
D2=20,9 миль
g1=57,3/22,5=2,55 град/миль
g2=57,3/20,9=2,74 град/миль
∆n1=1,7/2,55=0,66
∆n2=1,7/2,74=0,62
2. Рассчитаем угол пересечения линий положения и (всегда менее 90°).
И=59є
3. Рассчитывают сумму и разность полуосей эллипса погрешностей по формулам
 =1,44 мили
=1,44 мили
 =0,4 мили
=0,4 мили
4. Рассчитаем полуоси эллипса погрешностей:
 =0,92 мили
=0,92 мили
 =0,52 мили
=0,52 мили
5. Рассчитывают угол ориентировки большой полуоси эллипса погрешностей относительно второй линии положения:
 =1,331
=1,331
Ш=3,8є
6. Рассчитываем среднюю квадратическую погрешность обсервованного места
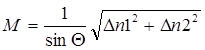 =1
=1
Определение динамического радиуса ведущих колес
Динамический радиус rк ведущих колес колесного трактора при обычных шинах определяем по следующей формуле:
rк = 0,0254[0,5d + (0,8 .0,85) B] м, (9)
где d и B - соответственно диаметр посадочного обода и ширина профиля колеса в дюймах.
Принимаем динамический радиус ведущих колес rк =0,6 м по протатипу. ...
Классификация трубопроводов
...
Дорожно-транспортные происшествия
С появлением механических транспортных средств на дорогах и улицах населенных пунктов возникла необходимость в выработке определенных правил поведения участников дорожного движения. Прообразом подобных правил в России можно назвать действовавшее в Москве с 1812 г. распоряжение для гужевого транспорта, согласно которому в городе устанавливалось правостороннее движение, ограничивалась скорость, определялись места стоянок экипажей и вводились номе ...