Контур тока якоря.
Принимаем
![]() ,
,
Необходимо ограничение выходного сигнала на уровне 10В, следовательно выбираем стабилитрон с напряжением стабилизации 10В.
В качестве датчика тока выбираем ДТХ – 10.
Технические данные ДТХ – 10:
Допустимая перегрузка по измеряемому току (разы) 1.5
Диапазон рабочих температур -20…+80 0С
Основная и приведенная погрешность 1%
Нелинейность выходной характеристики 0.1%
Номинальный ток 10 А
Коэффициент передачи 1:2000
Полоса пропускания 1…50000Гц
Источник питания 15В 10%
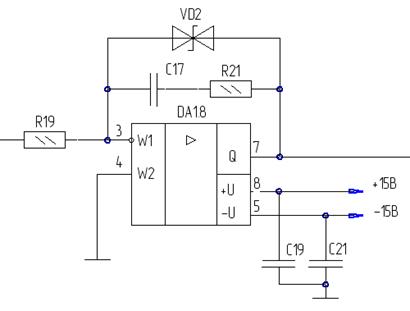
Рис. 9 Регулятор тока якоря. Схема принципиальная
Учитывая номинальный входной ток и коэффициент передачи, то номинальный выходной сигнал составляет 10/2000 = 0.005 А. Входной ток ![]() , тогда выходной ток
, тогда выходной ток ![]()
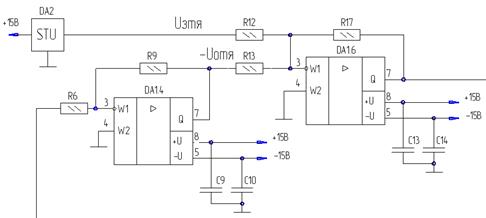
Рис. 10 Схема формирования сигнала - (UЗТЯ - UОТЯ)
Принимаем
![]() ,
,

Выбираем:
R9, R12 , R13 , R17 , R19 – C2-29В-0.125-10 кОм±0.05%
R6 – C2-29В-0.125-7.3 Ом±0.05%
R21 – C2-29В-0.125-192 Ом±0.05%
С17– К73-17-63В-12.3 мкФ±0.5%
VD2 – КС210Б
DA1.4, DA1.6, DA1.8 – К140УД17А
DA2 – AD1403
Контур скорости
Выберем тахогенератор ТГП-60.
Технические данные ТГП-60:
Номинальная частота вращения 1500 об/мин
Крутизна выходного напряжения 60 мВ/(об/мин)
Нелинейность выходного напряжения 0.1 %
Асимметрия выходного напряжения 0.2 %
Коэффициент пульсации 2.5%
Сопротивление нагрузки 6 кОм
Температурный коэффициент
выходного напряжения 0.01%/0С
Момент инерции ротора 10-5 кг/м2
Статический момент трения 10-2 Нм
Максимальная частота вращения привода 1140 об/мин, тогда напряжение на выходе тахогенератора ![]() .
.
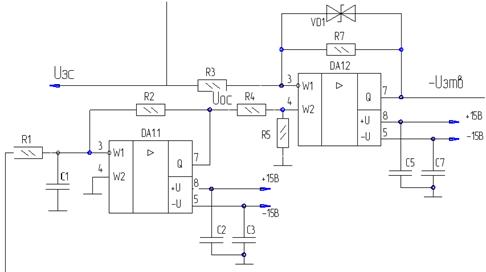
Рис. 11 Схема формирования сигнала КРС(- UЗС + UОС)
Принимаем
![]() ,
,
![]()
![]()
![]()
В связи с коммутационными процессами, имеющими место в коллекторном узле тахогенератора, необходим фильтр.
Принимаем постоянную времени фильтра ![]() с.
с.
![]()
Выходной сигнал ограничивается на уровне 10В стабилитроном с напряжением стабилизации 10В.
Выбираем:
R1 – C2-29В-0.125-87.4 кОм±0.05%
R2, R5, R7 – C2-29В-0.125-10 кОм±0.05%
R3, R4 – C2-29В-0.125-145 Ом±0.05%
С1 – К73-17-63В-46 пФ±0.5%
VD1 – КС210Б
DA1.1, DA1.2 – К140УД17А
Блок компенсации по первой производной скорости:
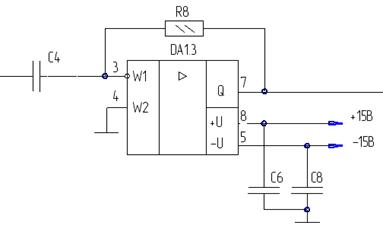
Рис. 12 Схема формирования сигнала (КК ∙р)
Принимаем
![]() ,
,
![]()
Выбираем:
R8 – C2-29В-0.125-1 МОм±0.05%
С4 – К73-17-63В-1.5 мкФ±0.5%
DA1.3 – К140УД17А
Контур тока возбуждения
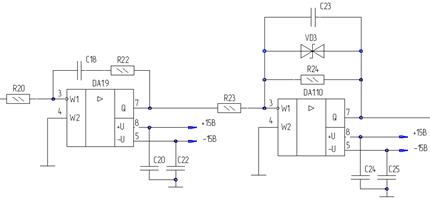
Рис. 13 Регулятор тока возбуждения. Схема принципиальная
Принимаем
![]() ,
,
Необходимо ограничение выходного сигнала на уровне 10В, следовательно выбираем стабилитрон с напряжением стабилизации 10В.
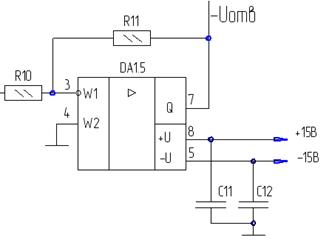
Рис. 14 Схема формирования сигнала (- UОТВ)
В качестве датчика тока выбираем ДТХ – 10.
Принимаем
![]() ,
,

Выбираем:
R10 – C2-29В-0.125-73 Ом±0.05%
R11 – C2-29В-0.125-1 МОм±0.05%
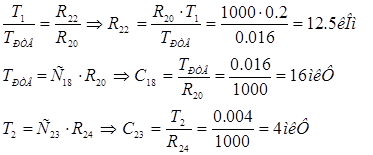
R20, R23 , R24 – C2-29В-0.125-1 кОм±0.05%
R22 – C2-29В-0.125-12.5 кОм±0.05%
С18– К73-17-63В-16 мкФ±0.5%
С23– К73-17-63В-4 мкФ±0.5%
VD3 – КС210Б
DA1.5, DA1.9, DA1.10 – К140УД17А
Для подавления помех между выводами питания микросхем и общим проводом подключаются конденсаторы – К10-17-25В-0.1мкФ±0.5%.