Расчетный режим работы
![]()
Максимальное ускорение, развиваемое электроприводом
![]()
Максимальная скорость в режиме слежения
![]()
Расчетная частота
![]()
Синтезируем систему комбинированного управления, добавив в неё дополнительное задание по скорости, которое выглядит следующим образом:
![]() ,
,
принимаем ![]()
Установившаяся ошибка должна быть![]()
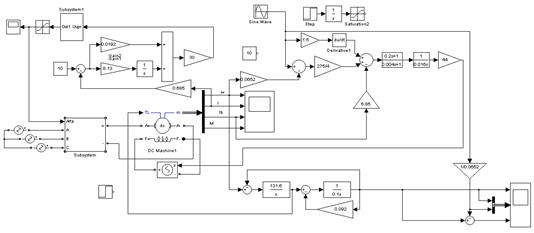
Рис. 2 Модель ЭП с учетом дискретности преобразователей.
На рис. 4 блок Subsystem – блок, моделирующий стабилизатор напряжения, Subsystem1 – блок, моделирующий определения угла управления из уравнения  . Где Uу – напряжение управления, приведенное к стандартному ряду -10…10В, Um – максимальное напряжение пилообразного сигнала, приведенный к стандартной шкале -10…10В.
. Где Uу – напряжение управления, приведенное к стандартному ряду -10…10В, Um – максимальное напряжение пилообразного сигнала, приведенный к стандартной шкале -10…10В.
В модели не учитывается дискретность ШИМ преобразователя в цепи возбуждения, так как частота коммутации достаточна для данного допущения.
Моделирование.
Пуск привода на номинальную скорость (7.78В) при линейном изменении задания.
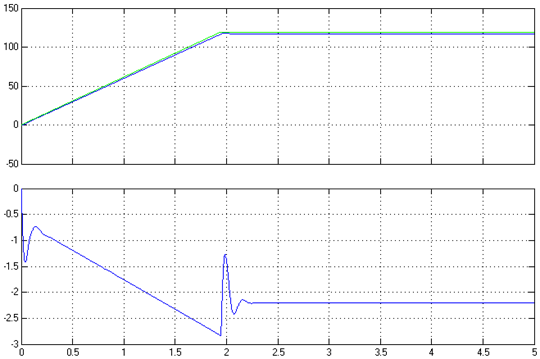
Рис. 3 Графики зависимостей ![]() .
.
Статическая ошибка по скорости составляет 2.2 рад/с, что удовлетворяет требованиям.
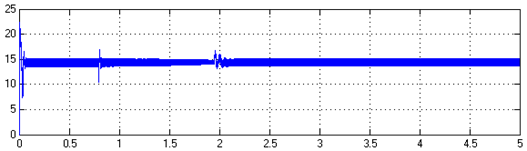
Рис. 4 Переходный процесс по току якоря
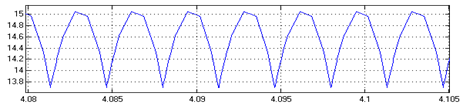
Рис. 5 Пульсации тока якоря в установившемся режиме
Из рис. 5 видно, что амплитуда пульсаций тока составляют 1.2 А, для двигателя допустимая амплитуда пульсаций 0.2*Iном = 0.2*14.6 = 2.92 А
Отработка приводом синусоидального задания с ![]()
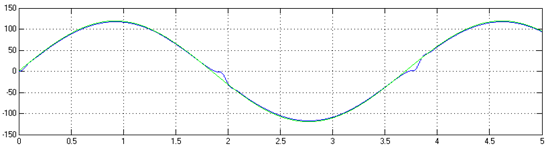
Рис. 6 Графики зависимостей ![]() .
.
Проведем эксперимент отработки приводом задания ![]()
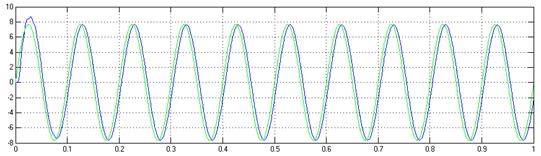
Рис. 7 Графики зависимостей ![]() .
.
Полоса пропускания привода ![]() , при
, при ![]()
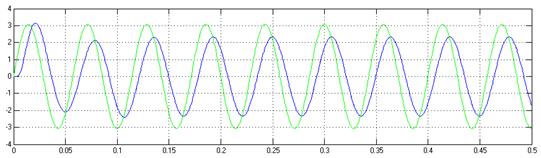
Рис. 8 Графики зависимостей ![]() .
.