При повороте необходимо преодолевать момент сил трения в колесах или катках, который равен
![]() ,
,
где ![]() - суммарное сопротивление движению всех колес или катков, приложенное по оси кругового рельса с радиусом
- суммарное сопротивление движению всех колес или катков, приложенное по оси кругового рельса с радиусом ![]() .
.
В случае колес (рис. 5, а) сопротивление ![]() складывается из трения в цапфах и трения качения и определяется так же, как и сопротивление колес механизма передвижения
складывается из трения в цапфах и трения качения и определяется так же, как и сопротивление колес механизма передвижения
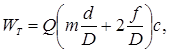
где Q - вес поворотной части с грузом; с - коэффициент, учитывающий дополнительные потери на трение в ребордах и скольжение (цилиндрические колеса).
В случае катков (рис. 5, б) трение в цапфах отпадает, но возникает трение качения по двум опорным поверхностям.
Момент трения качения удваивается, но движущая сила прикладывается здесь на ободе катка при мгновенном центре вращения в точке О. Следовательно
![]()
откуда, с учетом дополнительных потерь на трение в ступицах (конические катки) и на скольжение (цилиндрические катки), устранения скольжения необходимо, чтобы образующие конусы пересекались на оси вращения крана, что, согласно схеме рис. 6, б, будет и меть место, если
 .
.
Во время вращения крана в центрирующей цапфе вследствие давления ветра и окружного усилия ведущей шестерни появляется относительно небольшой момент трения, которым обычно можно пренебречь.
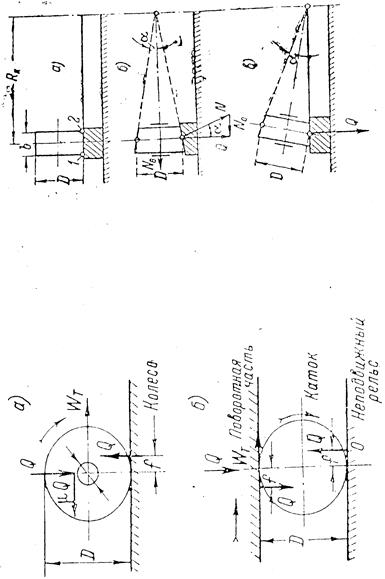
Рис.5.
Необходимо отметить, что в настоящей работе ставилась задача рассматривать действующие нагрузки на механизмы поворота крана, которые возникают от так называемых статических сил (сила тяжести элементов металлоконструкций крана и поднимаемого груза), а также ветровых нагрузок. Инерционные же силы, вызываемые разгоном и торможением вращающихся элементов крана, а также поднимаемого груза, целях упрощения задачи здесь не учитывались, а силы эти, учитывая значительные массы элементов крана и груза, на поворотных кранах весьма значительны. Поэтому при реальном проектировании механизмов поворота инерционные силы необходимо учитывать.
Механизмы поворота служат для приведения во вращение металлоконструкций крана и груза. Принципиальное отличие работы механизма поворота от механизмов подъема и перемещения заключается в том, что при повороте отсутствуют поступательно движущиеся массы, имеются только вращающиеся массы. По устройству поворотной части поворотные краны могут быть разбиты на две группы: краны на колонне и краны на поворотной платформе.