Электронная программа стабилизации или, как ее обычно называют, система стабилизации движения (ESP) срабатывает в опасных ситуациях, когда возможна или уже произошла потеря управляемости автомобилем. Путем притормаживания отдельных колес система стабилизирует движение. Она вступает в работу, когда, например, из-за большой скорости при прохождении правого поворота передние колеса сносит с заданной траектории в направлении действия сил инерции, т.е. по радиусу большему, чем радиус поворота. ESP в этом случае притормаживает заднее колесо, идущее по внутреннему радиусу поворота, придавая автомобилю большую поворачиваемость и направляя его в поворот. Одновременно с притормаживанием колес ESP снижает обороты двигателя. Если при прохождении поворота происходит занос задней части автомобиля, ESP активизирует тормоз левого переднего колеса, идущего по наружному радиусу поворота. Таким образом, появляется момент противовращения, исключающий боковой занос. Когда скользят все четыре колеса, ESP самостоятельно решает, тормозные механизмы каких колес должны вступить в работу. Время реакции ESP – 20 миллисекунд. Работает система на любых скоростях и в любых режимах движения.
Данная система пока является наиболее эффективной системой безопасности. Она способна компенсировать ошибки водителя, нейтрализуя и исключая занос, когда контроль над автомобилем уже потерян.
Безусловно, ESP высокоэффективная система. Однако, в действительности ее возможности ограничены. Причиной этого являются законы физики, изменить которые электроника не в силах. Поэтому если радиус поворота слишком мал или скорость в повороте превышает разумные границы, даже самая совершенная программа стабилизации движения здесь не поможет.
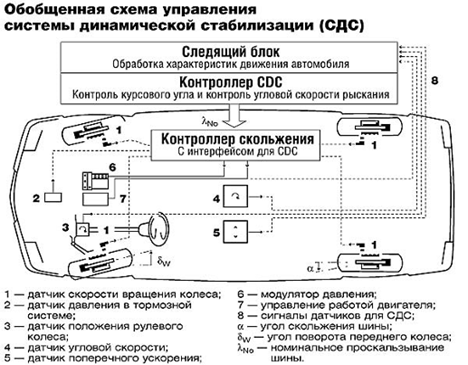
Рисунок 1. Схема ESP

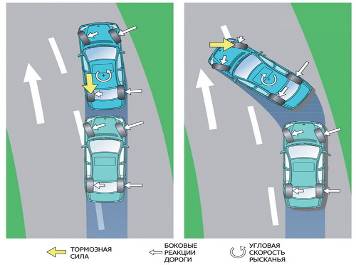
Рисунок 2. Принцип работы ESP