По данным таблицы 3.2 строим графики сопротивлений R0 и R2 в прямоугольной системе координат, затем используют их для определения максимальной скорости буксировки и силы тяги на гаке (Рисунок 3.1).
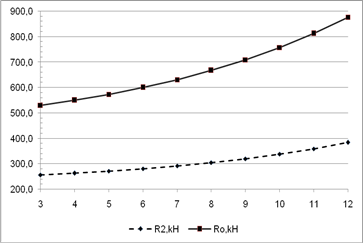
Рисунок 3.1 - Определение тяги на гаке и скорости буксировщика
Цветы оптом в Любытино среди цветов.
Максимальный упор гребного винта буксировщика равен 829,6 кН. Требуется определитьVбmax и силу тяги на гаке Тг.
По оси ординат откладываем отрезок "0a", равный 829,6 кН. Через точку "a" проводим линию, параллельную оси абсцисс, до пересечения с кривой суммарного сопротивления в точке "b". Из точки "b" опускаем перпендикуляр на ось абсцисс и получаем при их пересечении точку "c". Отрезок "0c" представляет собой максимальную скорость буксировки Vбmax, которая равна 11,3 уз.
Для определения тяги на гаке отыскиваем точку пересечения перпендикуляра "bc" с кривой сопротивления буксируемого судна. Обозначив эту точку буквой "d", проведем через нее линию, параллельную оси абсцисс, до-пересечения ее с осью ординат в точке "e". Отрезок "0e" определяет тягу на гаке Тг, которая равна 380 кН. Это и есть усилие, на которое следует подбирать буксирный трос.
Определение физического износа транспортного средства
с учетом возраста и пробега с начала эксплуатации
Расчет физического износа транспортного средства с учетом возраста и пробега с начала эксплуатации проводится по формуле:
(9)
где е - основание натуральных логарифмов, е ≈ 2,72
Ω - функция, зависящая от возраста и фактического пробега транспортных средств с начала эксплуатации.
Вид функции для различных видов транспортных средств на товарных рынках транспортных средств Российской Федерации определяется в соответствии с Таблицей ...
Проектирование технологического процесса ремонта компрессора
Наиболее часто встречаются такие неисправности компрессора, как снижение его производительности, перегрев при работе, пропуск масла в систему, стуки и нарушения в системе смазки. Относительно быстрое падение производительности может произойти в результате износа деталей, замерзания воздухопровода, снижения уровня смазки в компрессоре или несоответствия качества масла установленным требованиям. Как следствие всего этого – перегрев компрессора.
...
Корректирование периодичности ТО и Р
Для конкретного АТП эти условия могут отличаться, поэтому в общем случае нормируемый пробег до списания и периодичность ТО-1 и ТО-2 определяются с помощью коэффициентов, учитывающих категорию условий эксплуатации К1, модификацию подвижного состава К2 и климатический район К3. Пробеги до ТО-1 L1, ТО-2 L2 и списания Lсп, км, рассчитываются по формулам:
; (3.1)
; (3.2)
, (3.3)
где ,,– нормативные пробеги соответственно до ТО-1, ТО-2 и списания ...