Страница 2
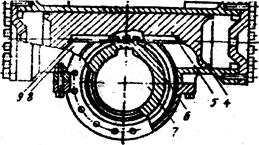
2) Исполнительная часть рулевой машины с плунжерно-реечным приводом.
Их выпускают в одинарном и сдвоенном исполнении типен РГ и 2РГ на крутящие моментм2,5-80 кН. м. Особенность \ устройства заключается в объединении двух соосных цилиндров в один цилиндр, названный моментным, с общ; м двусторонним плунжером 5. Последний по обоим концам уплотнен манжетами 4, а в остальной его части по длине, сделан вырез 8, в котором нарезала ьС чатая рейка 9 для сцепления с шестерней 6, насаженной па шпонке на баллер 7 рулевого органа* Сверху и снизу исполнительный механизм закрывается крышками с уплогиительными манжетами. Номинальное рабочее давление масла в этих машинах составляет 6,5-8,5 МПа. Преимуществом рулевых машин с плунжерно-реечным приводом являются малые габаритные размеры и масса.
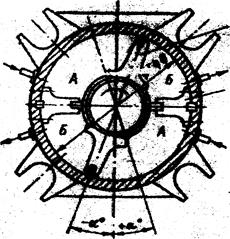
3) Лопастной рулевой привод является исполнительной частью электрогидравлической рулевой машины РЭГ-ОВИМУ-7. Принцип действия привода заключается в следующем. Ротор привода поворачивается по часовой стрелке при подаче рабочей жидкости в полости А, а полости Б при этом будут сливными. Противоположное поворачивание ротора достигается подачей рабочей жидкости в полости Б. Рулевой привод рассчитан на работу при номинальном давлении жидкости 3,5 МПа, крутящий момент при этом давлении составляет 70 кНм.
Предназначение производственной программы ремонта колесотокарного отделения
Общая программа ремонта колесных пар.
(5.1)
где кврз – коэффициент, учитывающий ремонт колесных пар на ВРЗ,
кврз = 0,12;
кдеп1 – коэффициент, учитывающий колесные пары, которые отправляют на линию, кдеп1 =0,22.
Программа колесных пар, которые проходят обмывку в моечной машине.
(5.2)
где e – коэффициент, учитывающий колесные пары, которые проходят полную ревизию e = 0,5.
Программа колесных пар, которые подлежат полной ревизии букс. ...
Определение ускорений, времени и пути разгона автомобиля
Определение ускорений
Для определения ускорений автомобиля используются расчетные данные динамической характеристики D и V.
Ускорение автомобиля j, м/с2, определяется из выражения:
jm = (Dm-) ×g/δврm, (32)
где – коэффициент суммарного дорожного сопротивления при i = 0
= 0,012(1+V2/20000); (33)
11 = 0,012(1+12,962/20000) = 0,0121
12 = 0,012(1+25,912/20000) = 0,0124
13 = 0,012(1+38,872/20000) = 0,0129
14 = 0,012(1+51,822/200 ...
Технико-экономический расчет
Себестоимость восстановления или изготовления деталей складывается из заработной платы производственных рабочих, складских расходов и стоимости материалов, израсходованных на восстановление или изготовление детали.
Определяем цеховую себестоимость
,
где ЗП – полная заработная плата производственных рабочих.
,
где ЗОСН – основная заработная плата производственных рабочих.
,
где tНУ – трудоемкость работ с нормальными условиями труда.
чел ...