Для выбранной ТТС необходимо перечислить всех участников доставки груза, в том числе количество привлекаемых экспедиторов. На схеме, показанной на рис. 3., указываются все используемые виды транспорта, места пересечения границ, места перехода права собственности и обязанностей по организации доставки в соответствии с базисным условием поставки (EXW).
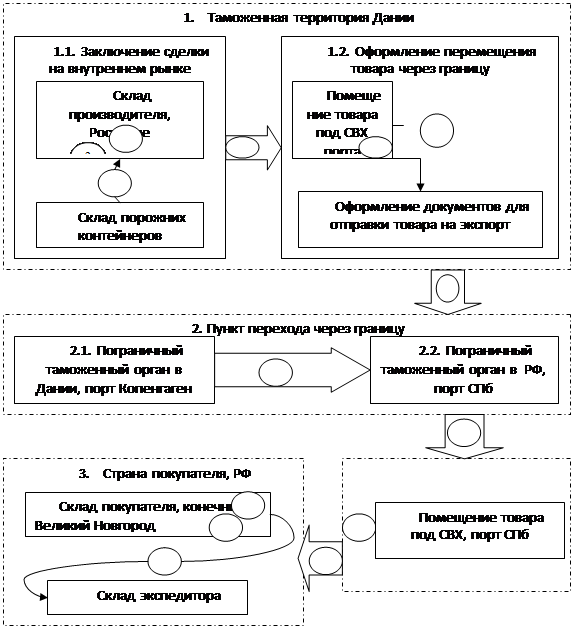 Рис. 3. Схема движения груза на условии EXW Роскилле, Дания
Рис. 3. Схема движения груза на условии EXW Роскилле, Дания
|

|
Движение груза |
|

|
Операция |
1 – подача порожнего контейнера со склада порожних контейнеров в Дании;
2 – оформление сопроводительных документов на груз;
3 – таможенная очистка по экспорту, проводимая брокером на складе ГО, имеющем статус СВХ;
4 – погрузка груза в контейнер и на АТС в Роскилле на складе ГО;
5 – перевозка АТ до порта Копенгагена;
6 – выгрузка контейнера на СВХ;
7 – складские операции;
8 – погрузка на судно;
9 – перевозка морем;
10 – выгрузка на СВХ в порту СПб, оформление документов;
11 – погрузка на АТ;
12 – перевозка АТ до склада ГП в Великом Новгороде;
13 – импортная таможенная очистка с привлечением таможенного брокера на складе ГП, имеющем статус СВХ;
14 – выгрузка груза с АТС и из контейнера и сдача ГП;
15 – доставка контейнера на склад порожних контейнеров, РФ.
Кроме того, для выбранной ТТС определяется окончательная стоимость транспортной составляющей с учетом 10 % вознаграждения экспедитору:
13 011×0,10+13 011 = 1 301,1 + 13 011 = 14 312,1 $.
Состояние и
структура рынка
Ситуация на рынке обслуживания автомобилей напрямую зависит от тенденций развития автопарка. За последние 10 лет он увеличился в 2,5 раза и в настоящее время состоит более чем из 30 млн. машин. Ежегодно этот показатель повышается на 8–8,5%. По данным Департамента автомобильного транспорта Минтранса РФ, в России в 2005 г. насчитывалось 45–46 млн. машин, а в настоящий момент с ростом автокредитования еще больше.
В то же время, на одну тысячу рос ...
Определение длины крестовины, прямой вставки и радиуса переводной кривой
Длина крестовины слагается из минимальных длин её передней n и хвостовой m частей. Математическим центром крестовины (С) называется точка пересечения продолжения рабочих кантов середечнка крестовины.
Рисунок 3.1 - Основные части одиночного обыкновенного стрелочного перевода: 1- стрелка; 2 – переводная кривая; 3 – крестовинный блок
Рисунок 3.2 - Схема определения минимальной длины
Размеры крестовины n и m по рабочим граням головок рельсов ...
Конструкция, классификация, принцип действия, обслуживание в работе центробежных
насосов
Центробежные насосы, относящиеся к динамическим, получили наиболее широкое распространение во всех отраслях народного хозяйства, а также на судах. Передача энергии от рабочего колеса в центробежных насосах происходит в результате взаимодействия лопастей с обтекающим их потоком, поэтому рассматриваемые насосы относят к лопастным.
Механизм передачи энергии в лопастном насосе можно объяснить следующим образом. При вращении рабочего колеса в насос ...