К геометрическим параметрам относят: параметры, определяющие расположение частей и элементов стенда относительно расположения рабочих органов на раме машины.
 габаритный размер задней тележки;
габаритный размер задней тележки;  габаритный размер для обкатки подбивочных блоков машины;
габаритный размер для обкатки подбивочных блоков машины; габаритный размер подъемно – рихтовочного – устройства;
габаритный размер подъемно – рихтовочного – устройства;  общий габарит размещения рабочих органов на раме машины
общий габарит размещения рабочих органов на раме машины
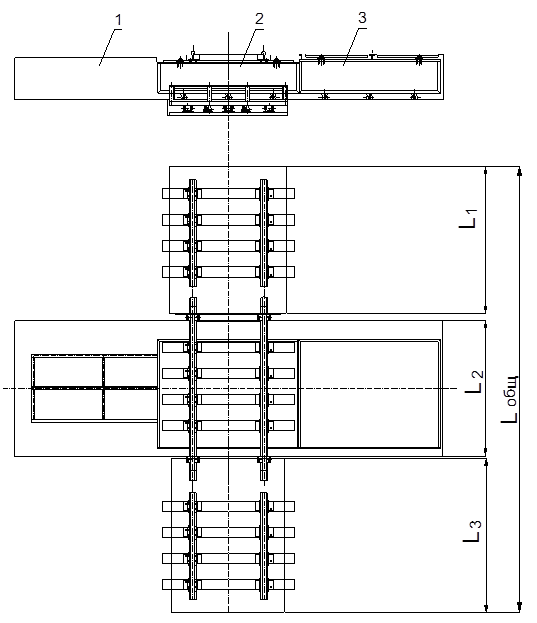
Рисунок 15 - Геометрическая компоновка стенда.
1 – расположение задней тележки машины; 2 – Емкость для обкатки подбивочных блоков; 3 – размещение подъемно – рихтовочного – устройства машины.
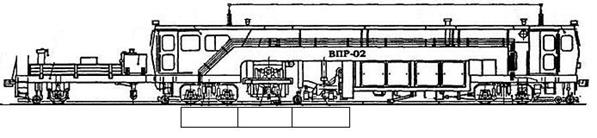
Рисунок 16 - Расположение машины и рабочих органов на стенде.
Геометрическая компоновка емкости для обкатки виброблоков:
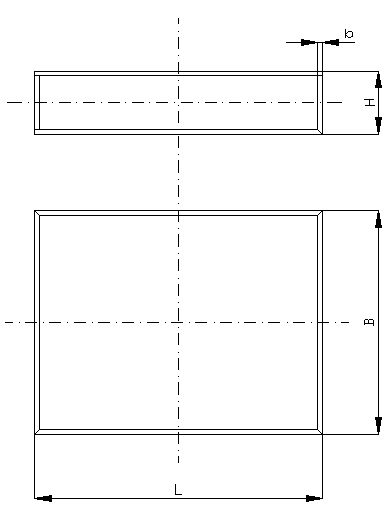
где – L - длина; B - ширина; H - высота; b - толщина стенки емкости.
Рисунок 17 – геометрическая компоновка емкости
Расчет производственной площади объекта проектирования
При поточном методе технического обслуживания площадь зоны ТО рассчитывается по формуле:
, м2, м²
где - длина зоны ТО, м; - ширина зоны ТО, м.
м
где - ширина автомобиля;
- ширина проходов
м
Длина зоны ТО рассчитывается по формуле:
, м
где - рабочая длина линии ТО, м;
- расстояние от автомобиля до наружных ворот (принимается равным 1,2…2,0, м.
Рабочая длина линии ТО рассчитывается по формуле:
, м
м
где - габаритная д ...
Определение количества рабочих тележечного участка
Явочное количество производственных рабочих тележечного участка.
, (4.10)
где WТЕЛ – трудоемкость выполнения на одной тележке:
- разборка и сборка тележки – 1,23 чел/час;
- ремонт надрессорной балки и боковин – 2,45 чел/час;
- ремонт триангелей (комплект) – 1,76 чел/час.
Всего на одну тележку трудоемкость этих работ составляет 5,44 чел/час.
чел,
принимаем =18 чел.
Используя формулы, приведенные в разделе 3.7, аналогично рассчитаем коли ...
Рациональные
решения совершенствования параметров постоянных устройств для повышения скорости
поездов межобластного сообщения
В соответствии с теоретическими положениями, заданное сокращение времени хода достигается за счет комплекса взаимоувязанных мероприятий по формированию оптимальной схемы остановок и совершенствованию параметров постоянных устройств.
Целью модернизации постоянных устройств является снятие ограничений скорости, число которых зависит от рода тяги и, особенно, скорости движения поездов.
Анализ существующих ограничений скорости на основных направл ...