Несущий винт является важнейшей частью вертолета. Основным назначением НВ является создание подъемной силы на всех режимах полета и сил, обеспечивающих поступательное перемещение вертолета в заданных направлениях. Помимо этого, несущий винт создаст устойчивость вертолету и используется для управления им [5].
Несущий винт состоит из лопастей и втулки. Лопасти создают потребную подъемную силу. Втулка представляет собой кинематический механизм, обеспечивающий движение и угловые перемещения лопасти в вертикальной и горизонтальной плоскости под воздействием аэродинамических и инерционных сил, а также поворот лопасти для управления её подъемной силой [3].
По способу крепления лопасти к втулке и втулки к валу, который вращает винт, несущие винты можно подразделить на четыре типа:
1). с шарнирной подвеской лопастей (рисунок 1.3, а, б);
2). на кардане (рисунок 1.3, в);
3). с жестким креплением лопастей (рисунок 1.3, г);
4). с упругим креплением лопастей (рисунок 1.4).
В настоящее время на некоторых легких вертолетах применяются несущие винты с рессорным креплением лопастей, которые можно считать разновидностью винтов первого типа [5].
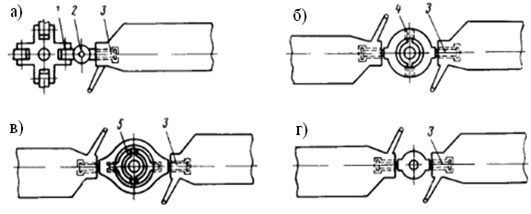
Рисунок 1.3 – Типы несущих винтов, где а – с шарнирной подвеской лопастей; б – с общим горизонтальным шарниром; в – на кардане; г – с жестким креплением лопастей; 1 – горизонтальный шарнир (ГШ); 2 – вертикальный шарнир (ВШ); 3 – осевой шарнир (ОШ); 4 – общий горизонтальный шарнир; 5 – кардан
Шарнирная подвеска лопастей несущего винта к втулке позволяет им совершать три вида поворотных движений [4]:
1. Лопасть может поворачиваться вокруг оси, проходящей вдоль ее размаха, изменяя свой установочный угол, величина которого в формулах обозначается буквой φ. Угол φ называется еще шагом лопасти.
2. Лопасть может поворачиваться около горизонтального шарнира (ГШ), совершая маховые движения. Угол взмаха обозначается буквой β. Взмах вверх и вниз конструктивно ограничен упорами, но так, что при работе лопасть никогда их не касается. Нижний упор является ограничителем свисания лопасти при стоянке вертолета.
3. Лопасть может поворачиваться около вертикального шарнира (ВШ). Угол поворота лопасти относительно вертикального шарнира называется углом отставания или опережения и обозначается буквой ζ. Этот угол конструктивно также ограничен упорами.
Другим типом крепления лопастей является упругое крепление к втулке НВ при помощи торсионов, представляющих собой пакет упругих пластин, заменяющий ГШ или ВШ.
Пакеты торсионных пластин попарно соединяют противолежащие лопасти и воспринимают центробежные силы. Они же позволяют лопасти совершать маховое движение в плоскости тяги и поворачиваться относительно своей продольной оси [1]. На рисунке 1.4 представлена втулка с торсионным креплением лопастей несущего винта вертолета MD-500.
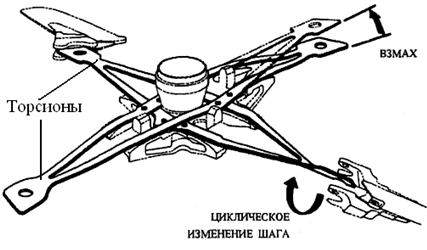
Рисунок 1.4 – Втулка НВ вертолета MD-500 с торсионами
Такая схема установки втулки позволила разгрузить приводной вал главного редуктора от переменных изгибающих нагрузок, возникающих на винте, и обеспечить посадку вертолета на авторотации в случае разрушения приводного вала.
Пластины торсиона растянуты центробежной силой. Они изгибаются при изгибных колебаниях лопасти в плоскости взмаха. Возникающие при этом напряжения уменьшают, помещая над и под торсионом специальные детали, ограничивающие его деформации. При изменении угла установки происходит закрутка обеих ветвей торсиона. Изгибные колебания лопасти в плоскости вращения приводят к изменению осевой силы в каждой ветви торсиона. В целом в поперечном сечении пластины возникают в основном нормальные напряжения от действия перечисленных факторов. Они имеют значительную переменную составляющую. Поэтому главной является задача обеспечения достаточного ресурса [1].