Конструкция, принцип действия электрических рулевых машин
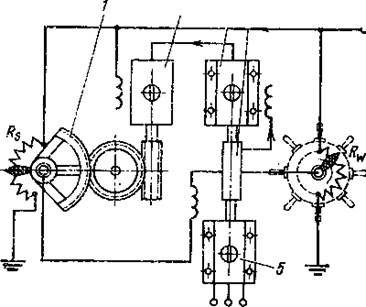
1- сектор, 2- рулевой двигатель,3- генератор, 4- регулятор, 5- привод генератора.
2- Рулевой штурвал приводит в движение перемещающийся контакт реостата с сопротивлением Rш имеющего электрическую связь с вторым реостатом, сопротивление в котором R5 меняется в зависимости от положения баллера. Если, например, вращение штурвала совпадает с направлением стрелки, то сопротивление увеличивается. Генератор, напряжение в обмотке которого контролируется регулятором, обеспечивает энергией исполнительный рулевой двигатель. Направление вращения исполнительного рулевого двигателя для рассматриваемого случая соответствует увеличению сопротивления R8 и уменьшению тока в регуляторе. В момент, когда руль занимает нужное положение, сопротивление R5 становится равным Rw и исполнительный рулевой двигатель останавливается.
Организация технологического процесса в аккумуляторном цехе автотранспортного
предприятия
Аккумуляторное отделение выполняет ремонт, зарядку и подзарядку АКБ. Во многих крупных автохозяйствах специалисты этого отделения производят и ТО АКБ при ТО-1 и ТО-2. В соответствии с технологией обслуживания и ремонта АКБ и современными требованиями к производству в цехе в особо крупных автохозяйствах, помещение отделения разделяют на отделения приема, хранения и ремонта (кислотное и зарядное).
Кислотное отделение предназначается для хранения ...
Разработка методики выполнения измерений
Основные положения:
МВИ определяют качество измерений, разрабатываются и применяются с целью обеспечения измерений физических величин с точностью, правильностью и достоверностью, удовлетворяющих регламентированным для них нормам. Аттестация МВИ и контроль реализаций МВИ являются конечными этапами метрологической деятельности, направленной на обеспечение единства измерений. К применению допускаются реализации аттестованных МВИ.
1. Формирование ...
Льды северного полушария
Особенности географического распространения морских льдов в северном полушарии в марте и сентябре показаны на рисунке 1.2:
Рисунок 1.2 - Распространение морских льдов в северном полушарии: 1 - в сентябре; 2 - в марте
В летний сезон морские льды в северном полушарии располагаются, главным образом, в Северном Ледовитом океане и лишь узкой полосой - вдоль юго-восточного побережья Гренландии, т.е. уже в водах Северной Атлантики. Как это видно н ...